In this paper, a new method, namely, the dynamic delay partitioning method, is firstly developed to solve the problems of stability analysis and stabilization for a class of unknown nonlinear systems. To study the system stability and facilitate the design of fuzzy controller, Takagi-Sugeno (T-S) fuzzy models are employed to represent the system dynamics of the unknown nonlinear systems. Different from previous results, the delay interval [0, d (t)] is partitioned into some variable subintervals by employing dynamic delay partitioning method. Thus, new delay-dependent stability criteria for fuzzy time-delay systems is derived, which is less conservative than previous results. By the criteria, the approach to design a fuzzy controller is developed. Two examples are provided to demonstrate the effectiveness for conservatism reduction.
Nonlinear systems with time-delay are very common in various industrial fields such as chemical processes and communication systems. Time-delay appears commonly in various practical systems such as chemical processes and communication systems, which generally lowers the system performance and even results in instability. In the last a few years, many authors considered the stability analysis and synthesis of time-delay systems as an important issue, and proposed several feasible approaches (see, for instance, [1, 2], and the references therein). Recently, fuzzy logic control based on Takagi-Sugeno (T-S) model becomes more and more popular for nonlinear systems. It is an efficient approach to deal with analysis and synthesis problems for complex nonlinear systems, especially in the presence of incomplete knowledge of the plant, and has many successful applications in industrial processes. The last decade has witnessed a rapidly growing interest in T-S fuzzy systems, and many important results have been reported. To mention a few, the problem of stability analysis is investigated in [3, 4]; stabilizing and H∞ control designs are reported in [5–9]; observer problem is addressed in [10–12].
Today, there are two kinds of useful methods dealing with problems associated with time delay: free-weighting matrix approach [13, 14] and augmented Lyapunov functional method [15, 16]. [13] considered the term in Lyapunov functional, which has been usually neglected in a previous literature, where d (t) denotes the time-varying delay and τ denotes the upper bound of d (t), i.e., d (t) ∈ [0, τ]. The free-weighting matrix approach is used as a main tool to make the criteria less conservative in the literature, and only the lower and upper bounds of delay function d (t) are considered. [15] used a new augmented Lyapunov functional, which contains a structure more general than the traditional ones in [13, 14] for involving an integral term of the state vector in Lyapunov functional. This new type of Lyapunov functional enables to establish less conservative results. Recently, a novel method was proposed for T-S fuzzy time-delay systems in [17, 19], which was carried out by partitioning the time delay interval [0, τ] into m subintervals with the same size. This method utilizes the information in the interval [0, τ] to achieve the aim of reducing conservativeness.
In the literature for T-S fuzzy systems with time-varying delay d (t), the delay interval [0, d (t)] is usually considered as a single interval. Therefore, how to use the information in [0, d (t)] to further obtain less conservative stability for T-S fuzzy systems with time-varying delay d (t) motivates our present study. Our proposed approach is to partition the delay interval [0, d (t)] into smaller variable subintervals, and study the stability based on these subintervals. In the following, we will introduce the idea of partitioning delay interval [0, d (t)] from the viewpoint of mathematics. We determine multiple points mρd (t) , ρ = 1, 2, ⋯ , K, where mρ ∈ (0, 1) and m1 < m2 < ⋯ < mK, such that interval [0, d (t)] can be partitioned into K + 1 subintervals [0, m1d (t)], [m1d (t), m2d (t)], ⋯, [mKd (t), d (t)]. Different from [17] which partitions the delay interval into the fixed subintervals with the same size, this kind of dynamic mode to partition delay interval is nominated as dynamic delay partitioning method since the points mid (t) can be chosen arbitrarily in the interval [0, d (t)]. Therefore, parameters mi are dynamic delay partitioning parameters, and (m1, m2, ⋯ , mK) is a parameter sequence satisfying 0 < m1 < m2 < ⋯ < mK < 1. Meanwhile, [0, m1d (t)], [m1d (t), m2d (t)], ⋯, [mKd (t), d (t)]) are called K + 1 variable subintervals, respectively.
Different from previous studies, the dynamic delay partitioning method has the following features:
1) The idea of partitioning delay interval into several subintervals will be utilized in this method. Unlike the previous works, which treat the delay interval [0, d (t)] as one single interval, [0, d (t)] will be partitioned into several subintervals in this paper. This is to say that much more information in the interval [0, d (t)] can be utilized.
2) Different from the fixed subintervals with the same size mode in [17], the dynamic delay partitioning method is the one with dynamic subintervals. In this method the delay interval is partitioned into variable subintervals, i.e., the points mρd (t) can be reconfigurable at delay interval [0, d (t)]. Compared to the fixed subintervals, this method has inherent flexibility, and should be more suitable to deal with time-varying delay d (t).
3) The stability results based on dynamic delay partitioning method are related to the number of subintervals, and the size of the variable subintervals or the position of the variable points (the values of parameters mρ). When the positions of the variable points are varied, the proposed stability criteria are also different. In order to obtain the optimal parameters mρ, we proposed an implementation based on optimization methods.
Therefore, this paper proposes a new dynamic delay partitioning method to deal with the stability of T-S fuzzy systems with time-varying delay, so that the larger allowable upper bound can be obtained by introducing these variable subintervals. Combining the fuzzy Lyapunov function approach [20], a new method is first proposed for the delay-dependent stability analysis of T-S fuzzy time-delay systems. The proposed stability conditions are much less conservative than most of the existing results due to the dynamic delay partitioning method, and they become even less conservative when the partitioning goes finer. Using these results, the problem of stabilization is also solved. Two illustrative examples show that our results are less conservative than those in previous literature.
The rest of this paper is organized as follows. Section 2 illustrates problem formulation and preliminaries of T-S fuzzy time-delay systems. Stability analysis is presented in Section 3. Controller design is presented in Section 4. In Section 5, the detailed implementations are presented to solve the delay partitioning parameters. Illustrative examples are given to demonstrate the effectiveness of the proposed approach in Section 6. Finally, conclusions are drawn in Section 7.
Notation. The notations that are used throughout this paper are fairly standard. AT stands for transpose of matrix A; the notation P > 0 (≥0) means that P is real symmetric and positive (semipositive); denotes the n dimensional Euclidean vector space; diag{⋯} stands for a block-diagonal matrix; and in symmetric block matrices or long matrix expressions, we use an asterisk “∗" to represent a term that is induced by symmetry. sym(A) is defined as A + AT. If not explicitly stated, all matrices are assumed to have compatible dimensions.
Preliminaries
A Takagi-Sugeno fuzzy control system
Consider the following nonlinear system
where is the state vector and is the input vector. We assume that f (x (t)), fd (x (t)) and g (x (t)) are sufficiently smooth on a domain , and f (0) = fd (0) =0, where “sufficiently smooth" means that all the partial derivatives are defined and continuous. The time-delay d (t) is a time-varying delay satisfying the inequalities below:
where τ > 0 and μ are two scalars. The initial condition of the system (1) is given by
φ (t) is a continuous vector-valued initial function defined on [-τ,0].
Throughout this paper, we assume that systems (1) and (3) are controlled and the system state is available for feedback.
From [21], the nonlinear system (1) can be represented by some simple local linear dynamic systems with their linguistic description as
Plant Rule i: IF z1 (t) is Mi1 and z2 (t) is Mi2 and ⋯ and zg (t) is Mig, THEN
where i = 1, 2, ⋯ , r and r is the number of IF-THEN rules, z1 (t) , z2 (t) , ⋯ , zg (t) are the premise variables of (4) and Mij (i = 1, 2, ⋯ , r, j = 1, 2, ⋯ , g) are the fuzzy sets corresponding to zj (t) and the plant rules, and Ai, Adi and Bi are known parameter matrices of appropriate dimensions.
By using a center average defuzzifier, product inference, and a singleton fuzzifier, the global dynamics of the T-S fuzzy systems (4) are described by
where
with Mij (zj (t)) representing the grade of membership of zj (t) in Mij. Then, it can be seen that, for all t,
From (1) and (5), we have
where
which denote the bounded modeling errors between the nonlinear plant (1) and the global fuzzy model (5).
In the following, a T-S fuzzy-model-based controller will be designed via parallel distribution compensation (PDC) [22], in which the fuzzy sets with the fuzzy model are shared for the designed fuzzy controller in the premise parts.
Controller Rule i: IF z1 (t) is Mi1 and z2 (t) is Mi2 and ⋯ and zg (t) is Mig, THEN
and Gi (i = 1, 2, ⋯ , r) are the fuzzy controller gain matrices to be determined.
The state feedback control law inferred is
For the sake of simplicity, λi (z (t)) is denoted by λi (t) in the following.
Substituting (7) into (8) yields the closed-loop global fuzzy system of (8).
Suppose that there exist known real constant matrices Dai, Ddi, Dbi, Nai, Ndi, and Nbi (i = 1, 2, ⋯ , r) of appropriate dimensions such that
where F (t) is an unknown real time-varying matrix with Lebesgue measurable elements bounded by
Then, the closed-loop system (8) can be rewritten as
where
and i = 1, 2, ⋯ , r, ΔAi (t), ΔAdi (t), and ΔBi (t) are unknown real matrices of appropriate dimensions representing time-varying parameter uncertainties of the system (11) and satisfying
The closed-loop system (8) for the nominal case is given by
where
Fuzzy Lyapunov function candidate
To find the fuzzy Lyapunov function which does not associate with the time-derivatives of membership functions in the stability analysis, consider a line-integral function given as in [23],
where Γ (0, x) is a path from the origin 0 to the current state x, is a dummy vector for the integral, is a vector which is a function of the state x, (·) denotes an inner product, and is an infinitesimal displacement vector.
Consider the fuzzy vector f (x) which shares the same fuzzy rules as in the plant rules.
Plant Rule i: IF z1 (t) is Mi1 and z2 (t) is Mi2 and ⋯ and zg (t) is Mig, THEN
where is a positive definite symmetric matrix satisfying
where
Therefore, the off-diagonal elements of are same, but the diagonal elements are different according to the fuzzy sets in the premise parts of the fuzzy rules.
The above fuzzy vector can be rewritten simply as
Before presenting the main results of this paper, we first introduce the following definition and lemma for the fuzzy system above, which will be essential for our derivation.
Definition 1. (Lie derivative) [24]: Let h: be a smooth scalar function, and g: be a smooth vector field on , then the Lie derivative of h with respect to g is a scalar function defined by
where
Similarly, if V is a Lyapunov function candidate for the system, its derivative can be written as LgV where . That is,
Lemma 1. [25]: Given appropriate dimension matrices M, E and F satisfying FTF ≤ I, for any real scalar ɛ > 0, the following result holds
Lemma 2. (Jensen’s Inequality): For any constant matrix Ω > 0, vector function χ (t) with appropriate dimensions, and function satisfying 0 < σ (t) ≤ δ, we have
Stability Analysis
In this section, the dynamic delay partitioning approach to the analysis and synthesis of the T-S fuzzy time-delay systems is presented.
Theorem 1.Consider the nominal fuzzy time-delay system in (14) and suppose that the controller gain matrices in (7) are known. Given parameters mρ (ρ = 1, 2, ⋯ , K) satisfying 0 < m1 < m2 < ⋯ < mK < 1, if there exist matrices defined in (17) (i = 1, 2, ⋯ , r), and
and K is a positive integer, such that the following LMIs hold:
where
then the fuzzy system in (14) is asymptoticallystable.
Proof. Construct the following augmented Lyapunov-Krasovskii functional:
where VΓ (t) is the same as (15), and
with
According to and Newton-Leibniz formula, calculating the derivatives of V (t) with respect to t along the trajectories of (14)yields
where
Therefore, the following holds:
where
By the Schur complement, is equivalent to
Note that (28) can be written as
Obviously, the conditions (20)-(21) establish the sufficient conditions for (29) to hold. Thus, the closed-loop system in (14) is asymptotically stable.
The proof is completed.
Remark 1. Obviously, Theorem 1 is the delay-partitioning-parameter-dependent criterion, and it depends on not only the value of parameter sequence (m1, m2, ⋯ , mK), but also the number ofsubintervals, i.e., the delay partitioning number K. When the delay partitioning number K and the value of delay partitioning parameter sequence are set with different values, the stability results in Theorem 1 are also changed, and the less conservative stability results can be obtained.
Remark 2. When the number K becomes larger, the conservatism of the results is further reduced, while the computational cost increases.
Controller Design
Based on Theorem 1, a state-feedback controller is designed guaranteeing the asymptotic stability of the closed-loop nominal fuzzy system in (14).
Theorem 2.Consider the nominal fuzzy time-delay system in (14). Given parameters ɛ, ɛi, mρ (ρ = 1, 2, ⋯ , K) satisfying 0 < m1 < m2 < ⋯ < mK < 1, the closed-loop system in (14) is asymptotically stable if there exist matrices X, Mi, , , , i = 1, 2, ⋯ , r, h = 1, 2, ⋯ , K + 1, and K is a positive integer, such that
where
Moreover, the fuzzy state-feedback controller can be chosen as (6), and the matrix gains of the controller are given by
Proof. The proof is based on the conditions of Theorem 1. We assume that X is invertible. Define Y = X-T, , and . Pre- and post-multiplying (30) and (31) with and , and , respectively. Defining P = ɛY, ,, , (i = 1, 2, ⋯ , r, h = 1, 2, ⋯ , K + 1), we arrive at (20) and (21). The proof is completed.
In this following, we discuss the problem of state-feedback controller design for the fuzzy delay systems in (11).
Theorem 3.Consider the fuzzy time-delay system in (11). Given parameters ɛ, ɛi, mρ (ρ = 1, 2, ⋯ , K) satisfying 0 < m1 < m2 < ⋯ < mK < 1, the closed-loop system in (11) is asymptotically stable if there exist matrices X, Mi, , , , scalars ɛijlb1⋯bK+1 > 0, , , and K is a positive integer, such that
where
and is defined in (32). Moreover, the fuzzy state-feedback controller can be chosen as (6), and the matrix gains of the controller are given by
Proof. Replacing Ai, Bi, and Adi in (30) with Ai + ΔAi (t), Bi + ΔBi (t), and Adi + ΔAdi (t), and from (13), we have
According to Lemma 1, the inequality (36) holds if
which, by the Schur complement, is equivalent to the inequality in (34). By following similar lines, the inequality (35) can be obtained. The proof iscompleted.
Remark 3. The sizes of subintervals are variable by altering parameter sequence (m1, m2, ⋯ , mK) satisfying 0 < m1 < m2 < ⋯ < mK < 1. Obviously, parameter sequence (m1, m2, ⋯ , mK) is more general and flexile than the parameter sequence (1/m, 2/m, ⋯ , (m - 1)/m) in [17].
Remark 4. It is a typical tradeoff between conservativeness and complexity. Our results are less conservative but are with more parameters. That is to say, by increasing the useful parameters, the aim of reducing conservativeness will be achieved. Meanwhile, the stability conditions are expressed in the form of matrix inequalities, which can be checked easily by using the interior point algorithm. Thus, the overall computation complexity looks similar to the previous methods.
Remark 5. Some studies on simultaneously reducing the complexity and conservativeness still need to be further carried out for the dynamic delay partitioning method.
The Implementation of Optimal Delay Partitioning Parameters
The key problem in this paper is how to choose the values of delay partitioning parameters mρ, where ρ = 1, 2, ⋯ , K. Take Theorem 1 for example, the optimization process is listed as follows to find the optimal parameter sequence (m1, m2, ⋯ , mK). It consists of three steps.
1) Define δ1 = m1, δ2 = m2 - m1, ⋯ , δK = mK - mK-1. According to the range of mρ, we can know that δi satisfies the following conditions:
2) Given μ, K, and (δ1, δ2, ⋯ , δK), we can obtain maximum allowable τ based on LMI ToolBox of MATLAB, which subjects to matrix inequality (20) and (21), and other restrictions in Theorem 1.
3) Choose the K + 1 groups of parameter sequence , where satisfying (37) and (38), ρ = 1, 2, ⋯ , K and j = 1, 2, ⋯ , K + 1. Based on these data and step 2), applying N-M simplex method proposed in [26], the optimal parameter sequence and the corresponding maximum allowable τ can be obtained for Theorem 1.
Illustrative Example
In this section, two examples are provided to illustrate the effectiveness of the proposed methods.
Example 1 (Controller Design)
Consider the following fuzzy time-delay system with uncertainties:
where
and
where
We consider robust control for the fuzzy system in (39). The results by applying the methods in [17–19] and Theorem 3 are listed in Table 1. The reduction of conservatism given by our approach is clearlyshown.
Comparisons of MAUB τ of the uncertain system (Example 1)
In the simulation, we utilize the following fuzzy membership function:
Example 2 (Application to Truck-Trailer Control)
Consider the following modified truck-trailer model with time-delay formulated in [17]:
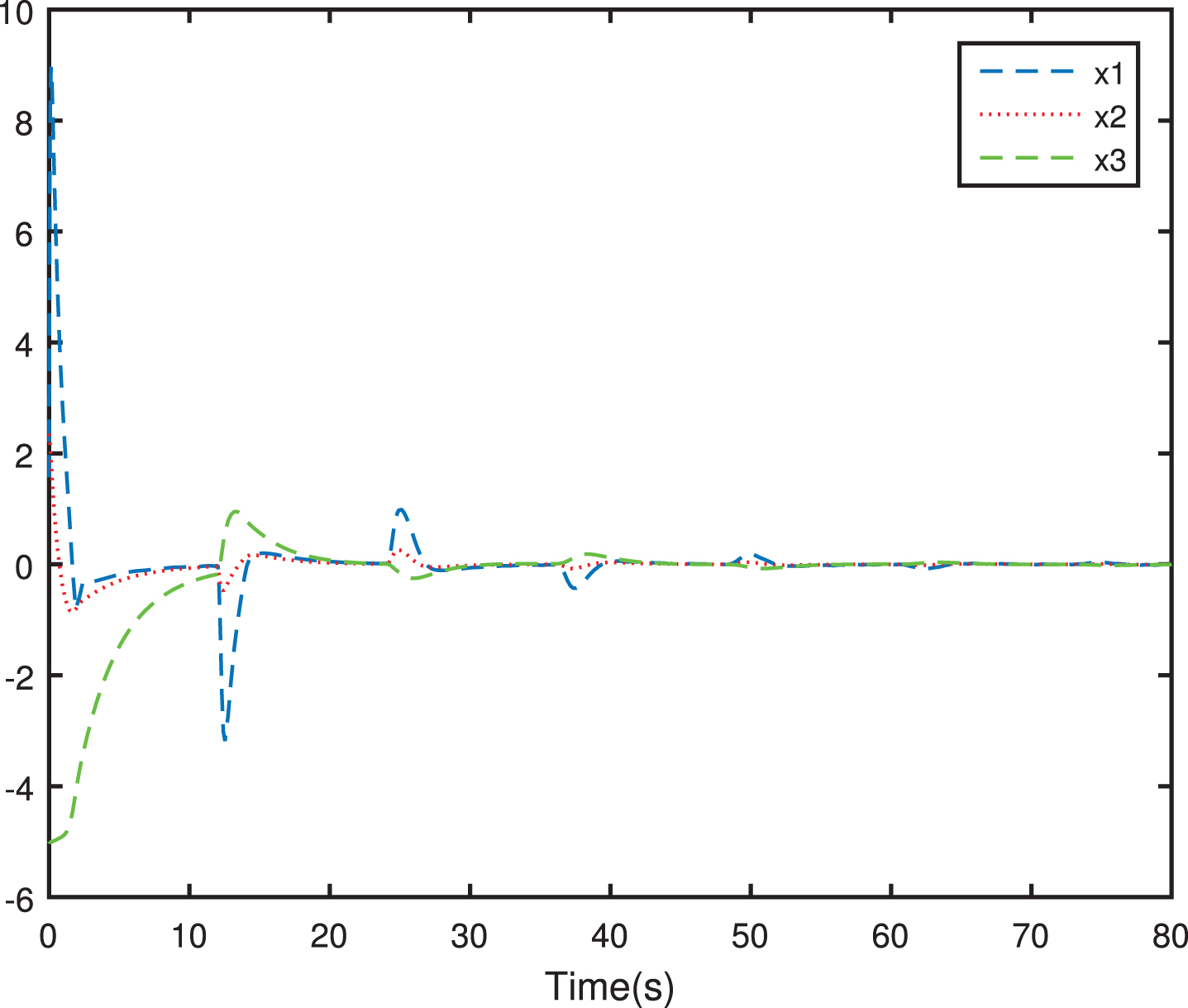
where x1 (t) is the angle difference between truck and trailer, x2 (t) is the angle of trailer, x3 (t) is the vertical position of rear end of trailer. The model parameters are given as l = 2.8, L = 5.5, v = -1.0, , and t0 = 0.5. The constant a is the retarded coefficient, which satisfies the conditions a ∈ [0, 1]. The limits 1 and 0 correspond to no delay term and to a complete delay term, respectively. In this example, we assume a = 0.7. Let . The T-S fuzzy model that represents the nonlinear system is as follows:
Plant Rule 1: IF θ (t) is 0 rad, THEN
Plant Rule 2: IF θ (t) is -π rad or π rad, THEN
where x (t) = [x1 (t) x2 (t) x3 (t)], and
We assume that the uncertainties in the system are modeled as that in [17], where F (t) = sin (2t), and
By using Theorem 3, we found that the fuzzy system is robustly stabilizable with the maximum time-delay value τ = 103.4389, and the fuzzy state-feedback controller gains are given by
Suppose the initial condition φ (t) = [0.5π 0.75π - 5] T. The state responses of the closed-loop system under the above controllers are shown in Fig. 1.
State response of the uncertain system.
Conclusions
This paper has investigated the problem of fuzzy controller design for a class of unknown nonlinear systems with T-S fuzzy model and dynamic delay partition. Compared with previous results, several negative definite terms with dynamic delay partitioning parameters will be added to criteria, which leads to the less conservative stability results. It is clear that dynamic delay partitioning method by applying the variable subintervals with delay d (t) has inherent flexibility, and is more suitable to deal with stability problem with time-varying delay. The results above have been further utilized to solve the stabilization problem. Two examples have been provided to show the effectiveness and advantage of the obtained results. The dynamic delay partitioning idea has been well demonstrated to be efficient for reducing conservatism and could be further extended to solve other related problems. But when the delay partitioning number K gets bigger, there will be a computational problem. Therefore, the study on simultaneously reducing the complexity and conservativeness need to be further carried out for the dynamic delay partitioning method in the future.
Footnotes
Acknowledgment
This work is supported by the National Natural Science Foundation of China (61374124, 6147306, 61627809).
References
1.
BrierleyS.D., ChiassonJ.N., LeeE.B. and ZakS.H., On stability independent of delay for linear systems, IEEE Transactions on Automatic Control27 (1982), 252–254.
2.
MahmoudM.S. and Al-MuthairiN.F., Design of robust controllers for time-delay systems, IEEE Transactions on Automatic Control39 (1994), 995–999.
3.
ZhangH.G. and XieX.P., Relaxed stability conditions for continuous-time T-S fuzzy-control systems via augmented multi-indexed matrix approach, IEEE Transactions on Fuzzy Systems19(3) (2011), 478–492.
4.
MozelliL.A., SouzaF.O. and PalharesR.M., A new discretized Lyapunov-Krasovskii functional for stability analysis and control design of time-delayed TS fuzzy systems, International Journal of Robust and Nonlinear Control21 (1) (2011), 93–105.
5.
LiuY., BanX.J., WuF. and LamH.K., Gain-scheduling control of T-S fuzzy systems with actuator saturation, Journal of Intelligent & Fuzzy Systems32 (2017), 2579–2589.
6.
SakthivelR., ShiP., ArunkumardA. and MathiyalagandK., Robust reliable H∞ control for fuzzy systems with random delays and linear fractional uncertainties, Fuzzy Sets and Systems302 (2016), 65–81.
7.
SakthivelR., SundareswariK., MathiyalaganK. and SantraS., Reliable H∞ stabilization of fuzzy systems with random delay via nonlinear retarded control, Circuits, Systems and Signal Processing35 (2016), 1123–1145.
8.
SakthivelR., SelviS., MathiyalaganK. and ShiP., Reliable mixed H∞ and passivity-based control for fuzzy markovian switching systems with probabilistic time delays and cctuator failures, IEEE Transactions on Cybernetics45 (2015), 2720–2731.
9.
ZhangH.G., LunS.X. and LiuD.R., Fuzzy H∞ filter design for a class of nonlinear discrete-time systems with multiple time delays, IEEE Transactions on Fuzzy Systems15 (3) (2007), 453–469.
10.
TsaiS.H., A global exponential fuzzy observer design for time-delay Takagi-Sugeno uncertain discrete fuzzy bilinear systems with disturbance, IEEE Transactions on Fuzzy Systems20 (6) (2012), 1063–1075.
11.
ZhangH.G., LiM., YanguJ. and YangD.D., Fuzzy modelbased robust networked control for a class of nonlinear systems, IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and Humans39 (2) (2009), 437–447.
12.
HyunC.H., ParkuC.W. and KimS., Takagi-Sugeno fuzzy model based indirect adaptive fuzzy observer and controller design, Information Sciences180 (11) (2010), 2314–2327.
13.
HeY., LiuuG. and ReesD., New delay-dependent stability criteria for neural networks with time-varying delay, IEEE Transactions on Neural Networks18 (1) (2007), 310–314.
14.
WangG., ZhangH.G., ChenuB. and TongS.C., Fuzzy hyperbolic neural network with time-varying delays, Fuzzy Sets and Systems161 (2010), 2533–2551.
15.
LiT., GuoL., SunuC. and LinC., Further result on delaydependent stability criterion of neural networks with timevarying delays, IEEE Transactions on Neural Networks19 (4) (2008), 726–730.
16.
XiaoH., HeY., WuM., XiaouS. and SheJ., New results on H∞ tracking control for sampled-data networked control systems, IEEE Transactions on Fuzzy Systems23 (6) (2015), 2439–2448.
17.
ZhaoY., GaoH.J., LamuJ. and DuB.Z., Stability and stabilization of delayed T-S fuzzy systems: A delay partitioning approach, IEEE Transactions on Fuzzy Systems17 (4) (2009), 750–762.
18.
ZhaoL., GaouH.J. and KarimiH.R., Robust stability and stabilization of uncertain T-S fuzzy systems with time-varying delay: An input-output approach, IEEE Transactions on Fuzzy Systems21 (5) (2013), 883–897.
19.
TsaiS.H., ChenuY.A. and LoJ.C., A novel stabilization condition for a class of T-S fuzzy time-delay systems, Neurocomputing175 (2016), 223–232.
20.
ZhangZ.Y., LinuC. and ChenB., New stability and stabilization conditions for T-S fuzzy systems withtime delay, Fuzzy Sets and Systems263 (2015), 82–91.
21.
TakagiuT. and SugenoM., Fuzzy identification of systems and its applications to modeling and control, IEEE Transactions on Systems, Man, and CyberneticsSMC-15 (1) (1985), 116–132.
22.
WanguH., TanakaK. and GriffinM., An approach to fuzzy control of nonlinear systems: Stability and design issues, IEEE Transactions on Fuzzy Systems4 (1996), 14–23.
23.
RheeuB.J. and WonS., A new fuzzy Lyapunov function approach for a Takagi-Sugeno fuzzy control system design, Fuzzy Sets and Systems157 (9) (2006), 1211–1228.
24.
LouJ.C., ZhangC.M., Relaxation analysis via line integral, in: Proceedings of the 2009 IEEE International Conference on Fuzzy Systems, Jeju Island, Korea, 2009, 1264–1269.
25.
WangY., XieuL.H. and DeC.E., Souza, Robust control of a class of uncertain nonlinear systems, Systems & Control Letters19 (2) (1992), 139–149.
26.
NelderJ.A. and MeadR., A simplex method for function minimization, Computer Journal7 (1965), 308–313.