In this paper, the optimal guaranteed cost control problem of a single species model with stage structure is studied by fuzzy methods. The non-linear harvesting model in a toxic environment is established, and the toxin considered has the characteristics of growth and reproduction. Furthermore, for the reason of practical problems, in which the period of production is a finite time and the biomass and toxin should be controlled into some range, the guaranteed cost controller is designed based on fuzzy models. While controlling the biomass concentration achieved the specified range, the controller in this paper eliminated the toxin entirely or controlled the toxin in traces concentration according the actual demand of different environment. Finally, a practical example is carried out to illustrate the feasibility of designed controller in the case of non-toxin and traces of toxin, respectively.
The issue of the optimal harvesting of all kinds of cultivation industry is always concerned by people, which is also a hot issue for researchers. There are many research results in recent years. Baten and others have studied fuzzy optimal control with application to discounted profit advertising problem [1]. Chakraborty has studied the problem of optimal control of a stage structured prey-predator fishery model [2]. Pal and others made some research on the optimal harvesting of prey-predator system with interval biology parameters [3]. Diamond and others have studied the issue on the harvesting in a stage-structured population with applications to the red snapper in the gulf of mexico [4]. Tahvonen and others have discussed the issue on the optimal harvesting of an age-structured schooling fishery and size-structured biological populations [5, 6].
Since the seminal contributions of Zadeh and his colleagues, fuzzy tools have been applied widely in many applications, such as computer science, systems analysis, electrical and electronic engineering, and etc. [7, 8]. Mamdani introduced fuzzy control system to control a steam engine and boiler combination by a set of control rules [9]. Takagi and Sugeno and Sugeno and Kang approach to dealing with fuzzy control system which were introduced for generation of fuzzy rules from a given input-output data set [10, 11]. T-S fuzzy model, proposed by Takagi and Sugeno in 1985, has been shown to be a powerful tool for modeling complex nonlinear systems. By means of the T-S fuzzy model, a nonlinear system can be represented by a weighted sum of some simple linear subsystems. By using the T-S fuzzy model, many issues related to the stability analysis and control synthesis of the complex nonlinear systems can be discussed. Fuzzy methods and fuzzy models are used wildly in the issue of optimal control [12–14].
With the situation of different toxin and pollution becoming more and more severe, how to clean up toxin, prevent pollution, and improve the production of cultivation industry has become a problem concerned most by the cultivators. Therefore, the problem of optimal harvesting specially under the situation with toxin and pollution has drawn more and more attention from researchers.
To make the research on how the toxin affects biosystem with applied mathematics model started from Hallam and his colleagues [15, 17]. In the following years, some related research results were emerging. Freedman and Shukla have studied single-species model and prey-predator model by the action of the toxin [18]. Zhang and others have studied the complexity, analysis and control of singular biological systems [19]. Zhang and others have studied the optimal harvesting of fishing aquaculture in the environment with prymnesiacee toxin [20]. Agarwal and Devi have studied a time-delay model for the effect of toxicant in a single species [21]. In this paper, the non-linear harvesting model in a toxic environment is established, and the toxin considered has the characteristics of growth and reproduction. For the reason of practical problems, in which the period of production is a finite time and the biomass and toxin should be controlled into some range, the guaranteed cost controller is designed based on fuzzy models such that both of biomass and toxin concentration achieve the specified range with the least cost in a finite time. Furthermore, while controlling the biomass concentration achieved the specified range, the controller in this paper eliminated the toxin entirely or controlled the toxin in traces concentration according the actual demand of different environment. Finally, a practical example is carried out to illustrate the feasibility of designed controller in the case of non-toxin and traces of toxin, respectively.
The single species stage-structured model was studied in [22].
where xi (t) and xm (t) are the densities of immature and mature populations, respectively. τ > 0 denotes the length of time from birth to maturity. αxm (t) is the birth rate of the immature population at the time t, and γxi (t) is the death rate of immature population. αe-γτxm (t - τ) is the rate of the immature population which is born at the time t - τ and transform from immature to mature stage at the time t. is the death rate of mature population.
In this paper, we also denote the densities of immature and mature by the differential equation of system (1). y (t) is the toxin concentration in the farming environment at time t. For the growing and multiplying, the concentration of the toxin in environment is changing with time and follows the limited space growth model as follows
where r0 is the natural growth rate of toxin in environment, r1 is internal restriction factor of the toxin. The absorption coefficients of toxin of immature and mature populations respectively are δ1 > 0 and δ2 > 0. Denote E2 as the harvesting effort of the toxin. ρ2 is the capture coefficient of E2. Then the concentration of toxin changing expresses as follows
Then we get the harvesting model with stage-structured while controlling toxin in the farming environment as the following differential equations
E1 represents the harvesting effort of the mature population. ρ1 is the capture coefficient of E1.
In Section 2, the non-toxin and traces of toxin equilibrium points of system (2) would be discussed.
The equilibria and fuzzy model
Firstly, the equilibrium points of system (2) will be discussed. Then, the non-toxin controlled system and the traces of toxin controlled system can be obtained by transformation. At last, the considered system is changed into T-S fuzzy models and written into general form.
Theorem 2.1.There are two non-extinction and non-negative equilibrium points of system (2), if
And if
there is a non-extinction and non-toxic equilibrium point of system (2).
If
there is a non-extinction and positive equilibrium point of system (2).
Proof. The equilibrium points of the parametric model (2) are given by steady state equations
After algebraic calculation, we get the trivial and non-trivial equilibrium points: P1 (0, 0, 0), , P3 (xi*, xm*, 0), and P4 (xi*, xm*, y*) , where , , . Clearly, P1 and P2 are extinction equilibrium points. If
P3, P4 are the non-extinction and non-negative equilibrium points. Especially, if
then y* = 0, P3 is the non-extinction and non-toxic equilibrium point. And if
then y* > 0, P4 is the non-extinction and positive equilibrium point.
This completes the proof of the theorem.
In the following, the non-toxic controlled system and the traces of toxin controlled system will be derived by using transformation.
For the system (2), P3 (xi*, xm*, 0) is the non-toxic and non-extinction equilibrium point. Let Z (t) = (z1 (t) , z2 (t) , z3 (t)) T, where z1 (t) = xi (t) - xi*, z2 (t) = xm (t) - xm* and z3 (t) = y (t). Then system (2) can be transformed into the following equivalent form
that is
where
Remark 2.2. In the process of aquaculture with toxin in environment, it is important to eliminate the toxin completely (like the system (7)). But sometimes it is difficult to be achieved. So, it is discussed that the biomass and toxin concentration of the ecological system should be controlled in the specified safety range.
For the system (2), P4 (xi*, xm*, y*) is the non-extinction and positive equilibrium point. Let Z (t) = (z1 (t) , z2 (t) , z3 (t)) T, where z1 (t) = xi (t) - xi*, z2 (t) = xm (t) - xm* and z3 (t) = y (t) - y*. Then system (2) can be transformed into the following equivalent form
that is
where
Remark 2.3. The biomass and toxin concentration of the ecological system could be controlled in the specified safety range finally (like the system (8)). That is, traces of toxin in the environment has little effect on the ecological system.
Then we first change system (7) and system (8) into T-S fuzzy model, respectively. And then the models would be written as the general form. At last, considering the general form of the systems, the main results of this paper are given.
For the system (7), since z2 (t) and z3 (t) represent the density of the mature population and the concentration of the toxin, respectively, it is feasible to assume z2 (t) ∈ [l1, l2], and z3 (t) ∈ [d1, d2], Hi and Ni (i = 1, 2) are fuzzy sets. Then the fuzzy state model can be written as follows, which is suitable for describing model system (7) as z2 (t) ∈ [l1, l2], and z3 (t) ∈ [d1, d2].
By fuzzy blending, the overall fuzzy model is inferred as follows:
For the system (8), since z1 (t), z2 (t) and z3 (t) represent the density of the immature population, mature population and the concentration of the toxin, respectively, it is feasible to assume z1 (t) ∈ [k1, k2], z2 (t) ∈ [l1, l2], and z3 (t) ∈ [d1, d2], Wi, Hi and Ni (i = 1, 2) are fuzzy sets. Then the fuzzy state model can be written as follows, which is suitable for describing model system (8) as z1 (t) ∈ [k1, k2], z2 (t) ∈ [l1, l2], and z3 (t) ∈ [d1, d2].
Rule 1: If z1 (t) is W1, z2 (t) is H1 and z3 (t) is N1, then
Rule 2: If z1 (t) is W1, z2 (t) is H2 and z3 (t) is N1, then
Rule 3: If z1 (t) is W1, z2 (t) is H1 and z3 (t) is N2, then
Rule 4: If z1 (t) is W1, z2 (t) is H2 and z3 (t) is N2, then
Rule 5: If z1 (t) is W2, z2 (t) is H1 and z3 (t) is N1, then
Rule 6: If z1 (t) is W2, z2 (t) is H2 and z3 (t) is N1, then
Rule 7: If z1 (t) is W2, z2 (t) is H1 and z3 (t) is N2, then
Rule 8: If z1 (t) is W2, z2 (t) is H2 and z3 (t) is N2, then
By fuzzy blending, the overall fuzzy model is inferred as follows
The system (7) and system (8) can be written as the general form
where is the state vector, is the control input. r is the number of If-Then rules, Ai, Adi, and Bi are real known matrices with appropriate dimensions.
Optimal guaranteed cost control
In this section, the related definition and results will be introduced for the general form of biological fuzzy systems firstly. Then the design of a mode-dependent control law for the system (11) will be focused on and the following cost function of the system satisfying certain requirement:
where M1 and M2 are two given symmetric positive definite matrices with appropriate dimensions.
Remark 3.1. For the system (11), ∫0T0XT (t) M1X (t) dt represents the average cost per unit volume to maintain the biomass in the time interval [0, T0], and ∫0T0uT (t) M2u (t) dt represents the average cost per unit volume to control the biomass and the toxin in the time interval [0, T0]. In this paper, T0 is the length of the production cycle.
Based on the parallel distributed compensation, the following state feedback fuzzy control law is employed
Then the closed-loop system is as following
First of all, the definition will be introduced for the development of main results throughout this paper. In order to describe system (14) succinctly, it could be transformed into the equivalent system
where , , .
Definition 3.2. (Finite-time Bounded): The time-delay system (15) is said to be Finite-time Bounded with respect to (c1, c2, T0, R), if
t0 ∈ [- τ, 0] , t ∈ [0, T0] . R is positive definite matrix with proper dimension. c1 and c2 are real numbers, and c2 > c1 > 0 .
Lemma 3.3.[23] If the following conditions hold
then the following parameterized matrix inequality holds
where αi (t) ≥0 and .
Theorem 3.4.The system (15) is Finite-time Bounded with respect to (c1, c2, T0, R) and the cost function (12) has an upper bound in the time interval [0, T0], if there exist a scalar , matrices P > 0, Q > 0, such that
where G = (Aξ + BξKξ). And the upper guaranteed cost bound is
where , .
Proof. Choose the Lyapunov functional candidate as
Then, the time derivative of V (X (t)) gives
where .
From (16), M1 > 0 and M2 > 0, we have
Then, we get
Multiplying (21) by , we can obtain
Integrating (22) from 0 to t with t ∈ [0, T0], we have
Then
On the other hand,
Combining (23), (24) and (25) leads to
Then, by (17), we have
for all t ∈ [0, T0]. Once again from (16) and (22), it can be easily seen
Further, (28) can be represented as
Integrating (29) from 0 to T0, we have
Noting that , it follows that:
This completes the proof of the theorem.
Theorem 3.5.There exists a state feedback controller with such that the system (15) is Finite-time Bounded with respect to (c1, c2, T0, R) and the cost function (12) has an upper bound in the time interval [0, T0], if there exist scalars τ ≥ 0, η1 ≥ 0, η2 ≥ 0, a ≥ 0 and matrices X > 0, Z > 0, Yi, such that
and the upper guaranteed bound is
where
Proof. From (32), (33) and Lemma 1, we get
Now pre and postmultiply (37) by diag {X-1, X-1, I, I} and its transposition. Then using the Schur complement Lemma, it follows that (32) and (33) imply (16) with X-1 = P, X-1ZX-1 = Q. Further, , . Then, by (34) and (35), we can obtain
Further considering (η1 + a) 2 ≥ 0, we have . So, from (36), combining (38) and (39), the inequality (17) holds. Then
This completes the proof of the theorem.
A practical example
In this section, a practical example is used to illustrate the main conclusions of this paper.
Prawn tastes delicious for ordinary people. Furthermore prawn has the special nutritious function to the undernourished people. In addition, Prawn contains abundant magnesium, which plays an important role in regulating on the heart activity and protects cardiovascular system available. Prawn also contains astaxanthin, which is an important material for people. Since 2008, numerous studies have confirmed that astaxanthin has strong antioxidant activity and plays a positive role in improving immunity, preventing cancer, cardiovascular disease, diabetes and other chronic disease [24, 25]. With high nutritive value and better flavor, prawn is popularly consumed by people. However, prawn is extremely sensitive to algae. The toxic effect of algae has the characteristics of high concealment, short time interval from intoxication to death, high lethality, thus, it can bring large economic loss to the aquaculture (especially the prawn harvesting aquaculture). When algae blooms happen, if we do not take any control measures, prawns will die soon. As the result, the farmer loses entire initial investment [26].
The Shangsantai reservoir is in Siping city, Jilin province of China. Annual output is nearly 400 tons (including fishs, prawns) while the general income is nearly 6,400,000 RMB yuan (the data above originates from the production statistics of fishing in 2014 in Siping city of Jilin province).
Farmers raised prawns in twenty ponds where area is four acres. The initial concentration of the prawns is 25,000 prawns every acre in a pond. The price of mature prawns is about 60 RMB yuan per kilogram. The net income of the breeding period is about 190,000 RMB yuan every pond. There are prawns in two of ponds died of algae blooms in 2015 (the data above originates from the production statistics of fishing in 2015 in Siping city of Jilin province).
We build the model based on the data in Siping. The average birth ratio and death ratio in the toxic environment of the immature prawns density α and γ are 0.34 and 0.20, respectively. The internal control coefficient of the mature prawns β is 0.05. The natural growth rate r0 of toxin in algae blooms condition is 0.5. The internal control coefficient of the algae toxin r1 is 0.005. The absorption rates of the farmed immature and mature prawns δ1 and δ2 in the toxic environment are 0.1 and 0.2, respectively. The length of time from birth to maturity τ = 9 is about 180 days.
The coefficients of the prawns-harvesting effort ρ1 and the toxin-eliminating effort ρ2 are respectively 20 and 50. Thus the model (7) can be specially noted as the following form
When T = 10, c1 = 0.1, c2 = 0.5, l1 = 0.1, l2 = 1, d1 = 0.1, d2 = 1, ; , by Theorem 2, the controller gains are given by
The optimal value of the upper guaranteed cost bound is 10, 724 RMB yuan, which represents the optimal average cost per unit volume to maintain and control the biomass in the time interval [0, 10].
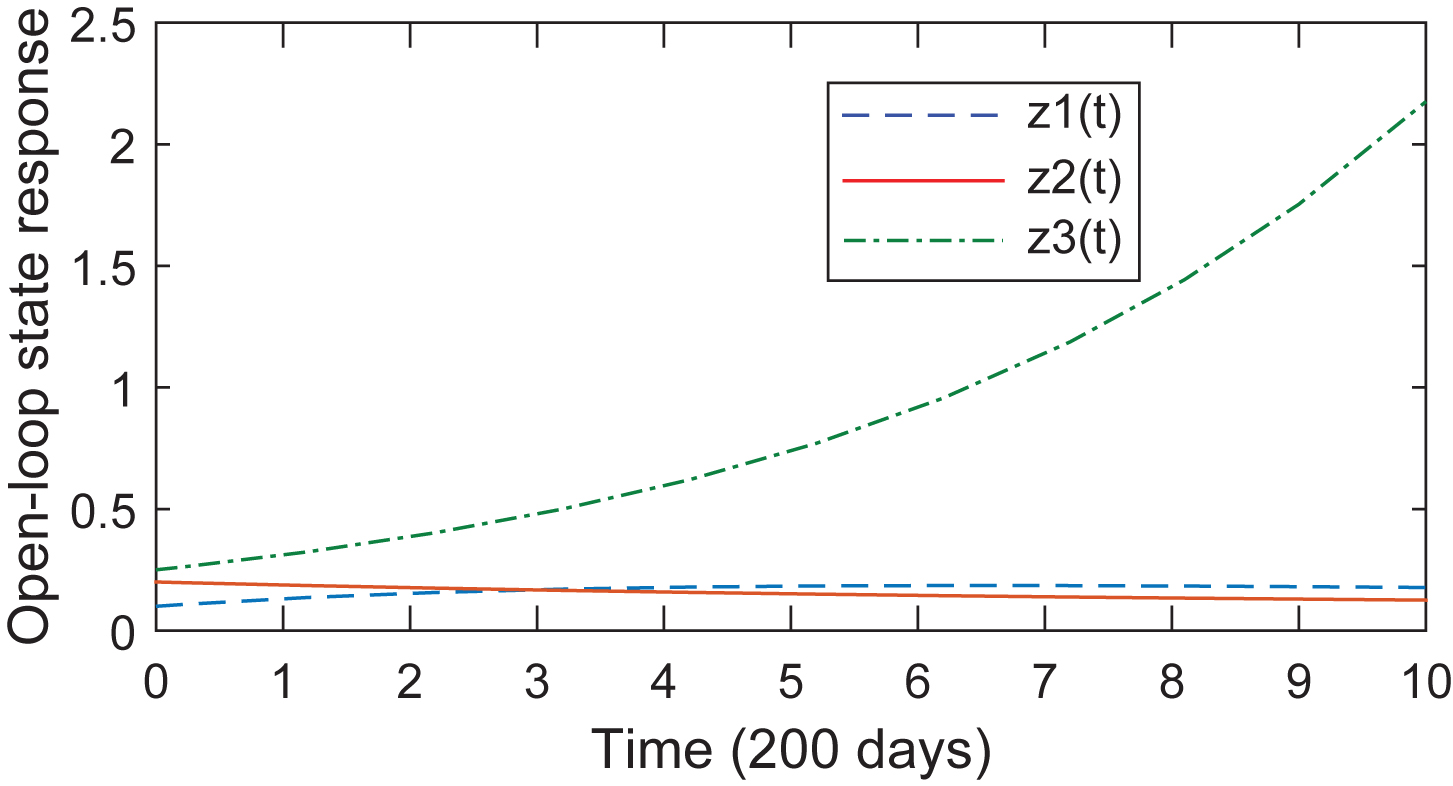
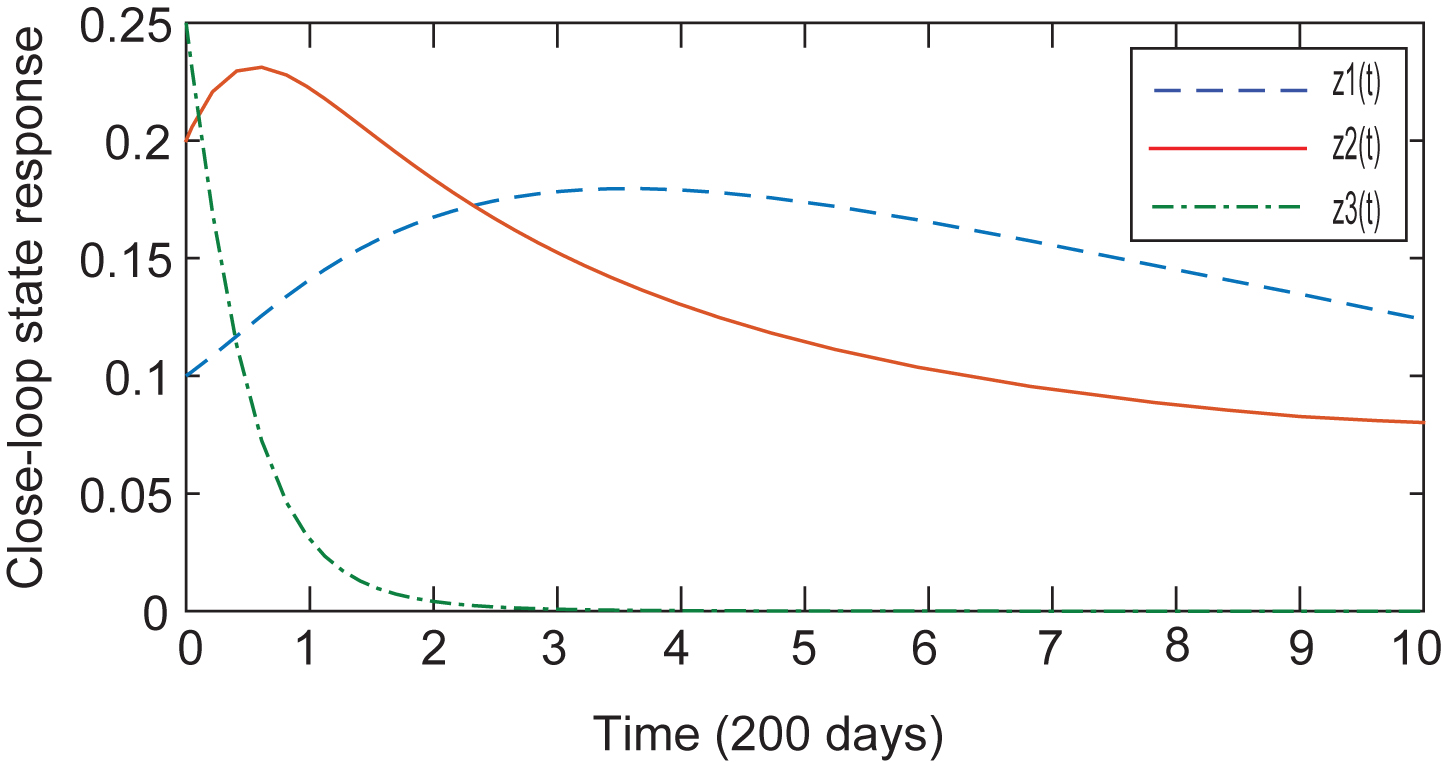
To demonstrate the effectiveness, assuming the initial condition Z (0) = [0.1 0.2 0.25] T, Figs. 1 and 2 show state responses of the open-loop system and the closed-loop system controlled by (13), respectively.
State response of the open-loop system.
State response of the close-loop system.
Remark 4.1. As shown in Fig. 1, if the system (7) can not be controlled effectively, the concentration of toxin increases constantly. Under the action of toxin and the reproduction of mature, although the immature density increases slightly, the density of mature decreases. If the method proposed in this paper is adopted to control the system, under the production of mature population, the density of immature increases firstly and then decreases as the immature growing up to mature. And the density of the mature increases firstly and then decreases under the harvesting of cultivators. Both the concentration of toxin and the densities of mature and immature achieve the specified range with the least cost in a finite-time as shown in Fig. 2. Let the coefficients of the prawns-harvesting effort ρ1 and the toxin-eliminating effort ρ2 be 1 and 20, respectively. For the parameters above, the model (8) can be specially noted as the following form
When T = 10, c1 = 0.3, c2 = 0.5, k1 = 0.1, k2 = 1, l1 = 0.1, l2 = 1, d1 = 0.1, d2 = 1, ; , by Theorem 2, the controller gains are given by
The optimal value of the upper guaranteed cost bound is 15, 997 RMB yuan, which represents the optimal average cost per unit volume to maintain and control the biomass in the time interval [0, 10].
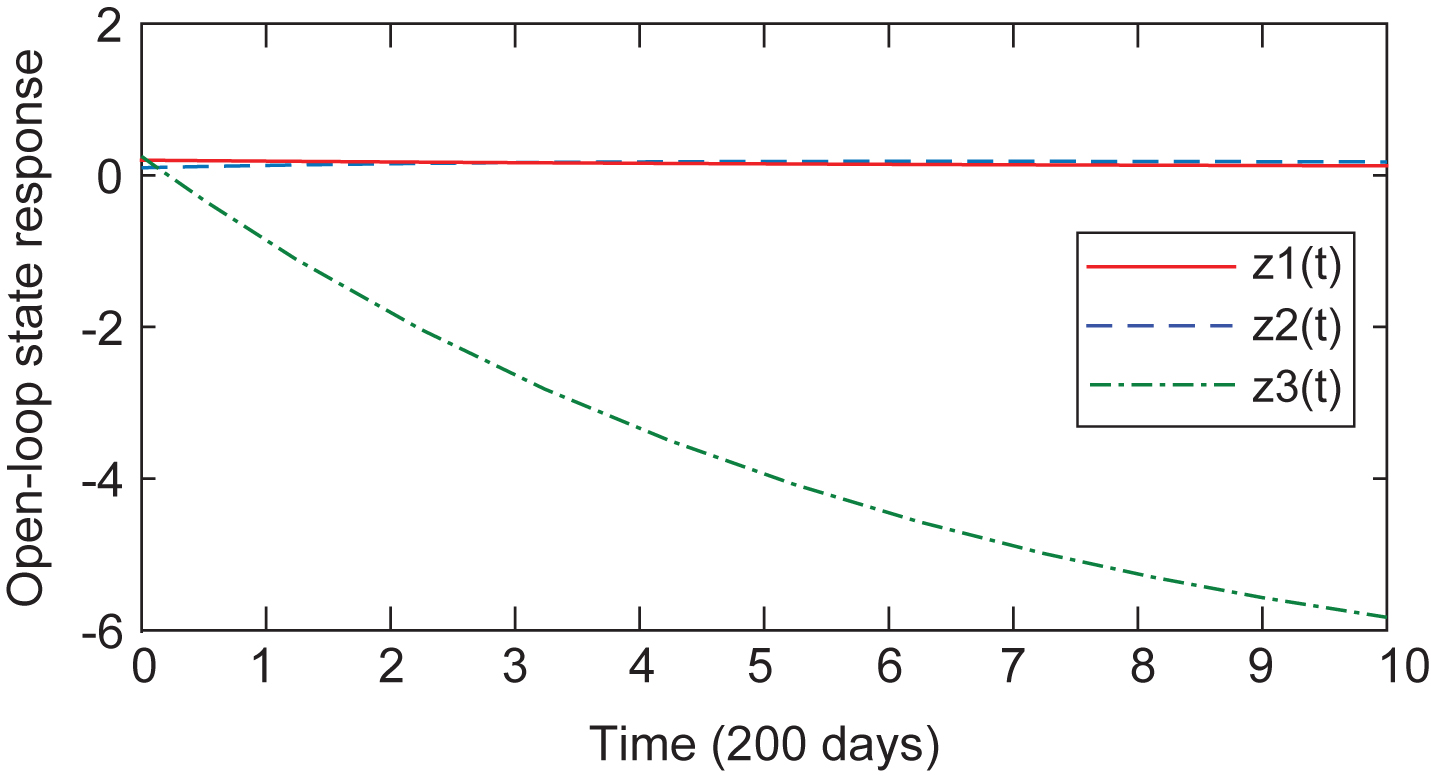
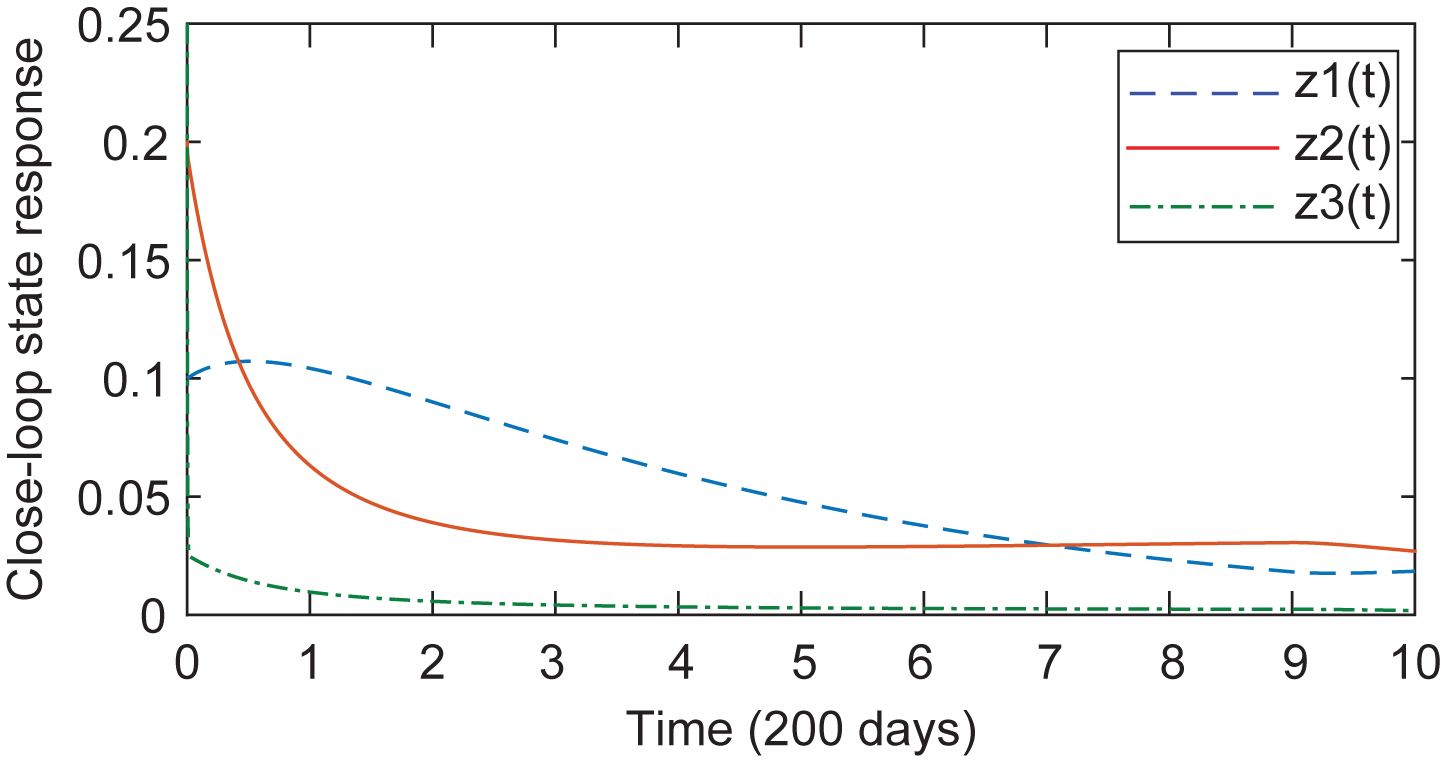
To demonstrate the effectiveness, assuming the initial condition Z (0) = [0.1 0.2 0.25] T, Figs. 3 and 4 show state responses of the open-loop system and the closed-loop system respectively.
State response of the open-loop system.
State response of the close-loop system.
Remark 4.2. As shown in Fig. 3, if the system (8) can not be controlled effectively, the concentration of toxin decreases very slowly. Under the action of toxin and the reproduction of mature population, although the immature density increases slightly, the density of mature decreases. If the method proposed in this paper is adopted to control the system, the toxin concentration shows a downtrend rapidly. The density of immature increases for the production of the mature, and then decreases as the immature growing up to mature. And the density of the mature decreases firstly under the harvesting of cultivators and then increases gradually for the immature growing up to mature. Both the concentration of toxin and the densities of mature and immature achieve the specified range with the least cost in a finite-time as shown in Fig. 4.
Conclusion
In this paper, the issue on fuzzy optimal guaranteed cost control of a single species model with stage-structure is studied. Taking the practical aquaculture as background, a harvesting model of aquaculture in toxin environment is built, firstly. Secondly, considering that the aquaculture period is finite-time, the controller is designed for this system such that both its biomass and the toxin concentration achieve the specified range with the least cost in a finite-time. The example illustrates the usability of the approach proposed in this paper under the cases of non-toxin and traces of toxin.
Footnotes
Acknowledgments
Authors acknowledge associate editor and anonymous reviewers consideration and patient work. All the comments from associate editor and anonymous reviewers are very valuable and helpful which have greatly improved the paper. This work is supported by National Natural Science Foundation of P.R.China, contract/grant numbers: 61673099, 61273008, 61673100 and 61104003. Fundamental Research Funds for Central Universities under Grant N150504011. Research Program for Liaoning Excellent Talents in University, Grant No. LJQ2014027. Hebei Province Natural Science Foundation, grant No. F2015501047. Research Program of Education Department of Jilin Province, Grant No. 2015214.
References
1.
BatenM.A. and KamilA.A., Fuzzy optimal control with application to discounted profit advertising problem, Journal of Intelligent and Fuzzy Systems23(5) (2012), 187–192.
2.
ChakrabortyK., DasS. and KarT.K., Optimal control of effort of a stage structured prey-predator fishery model with harvesting, Nonlinear Analysis: Real World Applications12 (2011), 3452–3467.
3.
PalD., MahaptraG.S. and SamantaG.P., Optimal harvesting of prey-predator system with interval biological parameters: A bioeconomic model, Mathematical Biosciences241 (2013), 181–187.
4.
DiamondS.L. and JangS.R.J., Harvesting in a stage-structured population with applications to the red snapper in the gulf of mexico, Journal of Biological Systems21 (2013), 1–19.
5.
TahvonenO., QuaasM.F., SchmidtJ.O. and VossR., Optimal harvesting of an age-structured schooling fishery, Environmental and Resource Economics54 (2013), 21–39.
6.
TahvonenO., Optimal harvesting of size-structured biological populations, Dynamic Optimization in Environmental Economics, Springer-Verlag, Berlin Heidelberg, 2014.
7.
ZadehL.A., Fuzzy sets, Information and Control8 (1965), 338–353.
8.
ZadehL.A., Fuzzy sets and applications, Wiley-Interscience, 1987.
9.
MamdaniE.H., Applications of fuzzy algorithms for control of simple dynamic dings, Proceedings of the Institution of Electrical Engineers121 (1974), 1585–1588.
10.
TakagiT. and SugenoM., Fuzzy identification of systems and its applications to modeling and control, IEEE Transactions on Systems, Man and Cybernatics15(1) (1985), 116–132.
11.
SugenoM. and KangG.T., Fuzzy modeling and control of multilayer and incinerator, Fuzzy Sets and Systems18 (1986), 329–346.
12.
JinX. and ShinY.C., Nonlinear discrete time optimal control based on Fuzzy Models, Journal of Intelligent and Fuzzy Systems29 (2015), 647–658.
13.
RoulJ.N., MaitybK. and KarcS., Optimal control problem for an imperfect production process using fuzzy variational principle, Journal of Intelligent and Fuzzy Systems32 (2017), 565–577.
14.
ZhaoF., ZhangQ., YanX. and CaiM., H∞ filtering for stochastic singular fuzzy systems with time-varying delay, Nonlinear Dynamic79 (2015), 215–228.
15.
HallamT.G. and ClarkC.E., Nonautonomous logistic equations as models of populations in a deteriorating environment, Journal of Theoretical Biology93 (1981), 301–311.
16.
HallamT.G., ClarkC.E. and JordanG.S., Effects of toxicants on populations: A qualitative approach. II. First order kinetics, Journal of Mathematical Biology18 (1983), 25–37.
17.
HallamT.G. and DeL.J.T., Effects of toxicants on populations: A qualitative approach. III. Environmental and food chain pathways, Journal of Theoretical Biology109 (1984), 411–429.
18.
FreedmanH.I. and ShuklaJ.B., Models for the effect of toxicant in single-species and predator-prey systems, Journal of Mathematical Biology30 (1991), 15–30.
19.
ZhangQ., LiuC. and ZhangX., Complexity, analysis and control of singular biological systems, Springer London421 (2012), 353–368.
20.
ZhangS., ZhangQ. and LiuC., Optimal harvesting of fishing aquaculture in the environment with prymnesiacee toxin, Journal of Biological Systems24 (2016), 237–255.
21.
AgarwalM. and DeviS., A time-delay model for the effect of toxicant in a single species growth with stage-structure, Nonlinear Analysis: Real World Applications11 (2010), 2376–2389.
22.
AlelloW.G. and FreedmanH.I., A time-delay model of singlespecies growth with stage structure, Mathematical Biosciences101 (1990), 139–153.
23.
TuanH., ApkarianP., NarkiyoT. and YamamotoY., Parameterized linear matrix inequality techniques in fuzzy control system design, IEEE Transactions on Fuzzy Systems9 (2001), 324–332.
24.
ChangM., High-calcium food: Dried small shrimps, Health Review5 (2012), 48.
25.
HuangW.W., HongB.H., YiR.Z., LiuJ.P., ChenY. and WangJ.K., The research progress of astaxanthin production method and biological activity, China Food Additives6 (2012), 214–218.
26.
YangD.Q. and ChenJ.X., The study on algae toxin syndrome of prawn, Ocean and Fishery3 (2015), 63–64.