
Abstract
Atmospheric scintillation brings additional noise to the detection system and reduces the receiving sensitivity of the system. It is urgent and necessary to introduce computer technology to improve the sensitivity of the system. Based on this, a computer simulation algorithm is proposed to simulate the atmospheric scintillation model in laser communication to analyze the sensitivity of the detection system. Taking Kalman filter estimation algorithm as the core of system state estimation, the problem of detection noise caused by atmospheric scintillation in laser communication is analyzed by means of computer simulation simulation algorithm. A Kalman filter estimation algorithm based on adaptive process-measurement model is proposed, and the computer simulation experiment of intensity scintillation caused by turbulence is carried out. The experimental results show that the error mean, covariance and root mean square error of the adaptive process model are the smallest. The second-order adaptive process model plays an important role in removing additional noise and improving system sensitivity, which meets our expectation of model order selection. The proposed method has good robustness, real-time and accuracy. Computer simulation algorithm is applied to the optimization of laser communication, which brings enlightenment to the optimization of laser communication technology and the application of computer intelligent algorithm.
Introduction
In nature, the random variation of atmospheric wind speed leads to the turbulent motion of the atmosphere, and the random variation of atmospheric temperature leads to the random variation of atmospheric density and the random variation of atmospheric refractive index. The cumulative effect of these changes leads to the obvious inhomogeneity of atmospheric refractive index profile [1]. When a beam propagates in a turbulent atmosphere, its wavefront fluctuates randomly, which results in a series of atmospheric turbulence effects such as beam jitter, intensity flicker (fluctuation), beam expansion and image point jitter [2]. Atmospheric scintillation effect (intensity scintillation) is that when the beam diameter is much larger than the turbulent scale, there are several turbulent vortices in the beam cross section. Each vorticity scatters and diffracts independently against the part of the beam on which it is irradiated, causing the intensity of light to rise or fall, that is, atmospheric scintillation. In laser communication system, atmospheric scintillation can cause random fluctuation of detection current of receiver, which leads to noise increase of detection system [3]. Therefore, the research and Simulation of atmospheric scintillation have important reference value for laser transmission and laser communication.
The limitation of Kalman filter is that it can only be used in linear signal process, that is, the state equation and the observation equation are linear stochastic systems, and the noise must obey the Gauss distribution [4]. Although many practical problems can satisfy these limitations, Kalman filter cannot give practical results when the non-linear characteristics of the actual system are slightly stronger or the noise characteristics deviate from the Gauss distribution. Nowadays, the complexity of the system is increasing. Meanwhile, the noise in the actual system is colored noise. The computer simulation algorithm can effectively solve the above problems, using computer software to analyze the target and the related technical means of simulation operation. At present, the computer simulation process mainly involves three main simulation elements: system, target model and computer. Through the analysis of various noise factors in the established laser communication detection system, the simulation algorithm of all elements involved in atmospheric scintillation causing noise in the system is carried out, and the organizational model is established, which gradually forms the whole process of simulating the influence of noise in the detection system. Therefore, the Kalman filter estimation algorithm is improved by using computer simulation algorithm to simulate the detection noise caused by atmospheric scintillation in laser communication.
This research is mainly divided into three parts: In the first part, the Kalman filter estimation algorithm based on adaptive model is introduced to explore the basic theory of atmospheric scintillation and the computer simulation of intensity scintillation caused by turbulence; in the second part, a computer simulation algorithm is proposed to solve the problem of detection noise caused by atmospheric scintillation in laser communication. In the third part, on the basis of Kalman filter estimation algorithm, an adaptive process-measurement model is proposed, which can extract the characteristics of the system itself and estimate the statistical characteristics of the system noise, in order to improve the effectiveness of the algorithm. Finally, simulation experiments are carried out to analyze the detection system.
Related work
Estimation theory of stochastic systems, also known as filtering theory, is the key to extract practical information from the observation data with random noise, so as to estimate the parameters or state of the system. However, Kalman filteralgorithm is effective in solving the state estimation of complex uncertain noise systems. In recent years, many scholars have done a lot of research on it. Xia C estimates voltage distribution using weighted least squares algorithm and makes a comprehensive mathematical analysis of the most important factors affecting the estimation accuracy. However, the limitation of this work is that it is difficult to deal with colored noise, and it is only applicable to linear systems [5]. Yang C L proposed a new particle filter technique, Sequential Evolutionary Filter (SEF). By using H∞ filter, the system state estimation is obtained without considering the noise of conventional adaptive filter. Its structure is very similar to that of Carl filter in matrix Riccati equation. The results show that the algorithm can effectively solve the problem of particle dilution [6]. Wang J proposed a Kalman filter method which can reduce the error of distance measurement data (pedestrian three-dimensional position) based on stereo vision. The coefficient of AR model of Kalman filter is calculated by solving the least square error solution using the hybrid Kalman filter method of autoregressive moving average (ARMA) model [7]. Yin X proposed a Kalman filter method and applies it to track reconstruction. It is found that although Kalman filter estimation algorithm can get the optimal estimation when the model is in line with the actual system, its shortcoming is also obvious, that is, it depends on the accuracy of the model very much [8]. Popoola W O constructed a Kalman filter with variable noise covariance matrix depending on noise attenuation parameters by using H∞ filter. It is found that the noise attenuation parameters have a great influence on convergence, accuracy and computational complexity [9]. Li J discussed the theoretical basis of intensity scintillation effect (atmospheric scintillation effect) in laser atmospheric transmission, and proposed a computer simulation algorithm. It was found that the algorithm still had some defects, that is, it could not estimate the system with complex uncertain noise [10]. Baykal Y analyzed the probability distribution of detection noise caused by atmospheric scintillation in laser communication and simulated it.The results show that the intensity, phase and direction of laser beam will be disturbed when it propagates through turbulent atmosphere, and the corresponding random changes will occur [11]. Li Y simulated the atmospheric random phase screen in accordance with Kolmogorov theory by Fourier transform method. The intensity and phase of collimated Gauss beam passing through Kolmogorov turbulence were simulated by step propagation method. The results show that the method is effective. It is considered that the atmospheric turbulence channel modeling and simulation technology and the random intensity signal detection technology are applied to wireless atmospheric laser communication system. The development of the system is very important [12]. Baykal Y analyzed the constellation diagram and bit error rate of 4PSK atmospheric laser communication system by computer simulation. The results show that the multiplicative noise of the system can be filtered by frequency domain deconvolution under different weather conditions,the influence of atmospheric turbulence on atmospheric laser communication system can be effectively suppressed, and the bit error rate of atmospheric laser communication system can be reduced [13]. In order to realize real-time compensation of atmospheric disturbance in satellite-to-ground laser communication, Luo Y simulated three optimization control algorithms, i.e. improved genetic algorithm, simulated annealing and mode approximation, and compared and analyzed the convergence speed, correction effect, stability and operation times of deformable mirrors. The simulation results show that the convergence speed of genetic algorithm is slow, but the normalized light intensity is raised from 0.0795 to 0.99, which is suitable for static aberration correction [14]. Zhao J combined with atmospheric turbulence and detectors to analyze the centroid tracking algorithm and centroid tracking algorithm. The conclusion that the tracking errorof centroid algorithm is less than centroid errorunder atmospheric conditions is obtained and verified by experiments [15]. Through the research of scholars at home and abroad, it can be found that the research mainly concentrates on the analysis of noise estimation system by Kalman filter estimation algorithm. Based on the previous research, Kalman filter estimation algorithm is taken as the core and adaptive model as the main breakthrough point. It mainly focuses on the following two aspects: adaptive process model and adaptive measurement model for studying the simulation algorithm of detecting noise caused by atmospheric scintillation in laser communication [16–18].
Computer simulation algorithm for detecting noise caused by atmospheric scintillation in laser communication
Kalman filter estimation algorithm based on adaptive model
Atmospheric turbulence is an important problem in optical communication system, which cannot be neglected. The main manifestations are atmospheric scintillation, beam jitter, beam drift, etc. These phenomena bring additional noise to the detection system and reduce the receiving sensitivity of the system. Therefore, the research and Simulation of atmospheric turbulence effect have important reference value for laser transmission and laser communication. In this section, the computer simulation algorithm of detecting noise caused by atmospheric scintillation in laser communication is introduced to realize simulation [19, 20]. The basic theory of atmospheric scintillation and the computer simulation of intensity scintillation caused by turbulence are discussed. For the direct detection system, the phase fluctuation can be ignored, and the scintillation effect is the main influence.
It is assumed that the process model and measurement model of linear discrete system are as follows:
Where x (k) is the estimator to be estimated, Z (k) is the measurement data obtained by the sensor. Formula (1) is generally referred to as the system process model, which refers to the rule that the state to be estimated in the system changes with time. The state x (k) of K at the previous moment will become x (k + 1) at the next moment, and A (k) is called process matrix, which represents the relation of state transformation. W (k) is called process noise, which indicates the degree of uncertainty in the process from X (k) to X (k + 1). Formula (2) is called measurement model, H (k + 1) is measurement matrix, V (k) is measurement noise. Assuming that w(k) and v(k) are zero-mean, irrelevant white noise, and the covariance matrix is known, they are respectively expressed by Q(k) and R(k). That is:
Among them, Delta (k-j) is the Kronecker-delta function, that is, if k = J then Delta (k-j) = 1, if K j, then Delta (k-j) = 0. The purpose of this method is to estimate the state x (k) on the basis of known system Equations (1, 2) and measurements with noise Z (k), k = 1, 2, 3… Accurate estimation using Kalman filter requires accurate system model, which is mainly divided into two parts: process model and measurement model. Among them, the process model mainly analyses the moving state of the target and establishes the model which accords with the moving state of the target. However, in the actual system state, such as the speed and displacement of a high-speed train, the vibration of a civil structure, and the track of an aircraft, they are all a maneuvering random process. In order to build a more practical process model, we must improve the existing model and build an adaptive model based on data-driven model. Based on the above ideas, an estimation algorithm based on adaptive process model is proposed. Consider a discrete-timesystem:
Among them, A (k) is the process matrix, x (k) is the k-time state vector, and w (k) is the process noise. In practical applications, process noise is generally more in line with the process of colored noise. The adaptive process model assumes that the acceleration of the target is an exponential autocorrelation zero-mean random noise process, and uses a (t) to describe the acceleration of the target, i.e.
Among them,
With the expanding application background of state estimation, in the face of a large number of unknown data, due to the lack of prior knowledge, these hypothesis-based models are generally difficult to obtain better estimation results. Therefore, based on the basic idea of data contains models while models are integrated into data, a reasonable model is developed, which can be obtained and estimated when only the motion measurement data of maneuvering targets exist.
In practice, the measured noise is contained in the data, and the accurate system model is needed to obtain the optimal estimation of the state in the presence of these noises. However, the parameters of the current system model also need to be estimated. Therefore, there are two estimation processes in the whole system at the same time. How to ensure the convergence of the whole system under two estimation processes is the key of this data-driven modeling method.
Therefore, considering the above conditions, a Kalman filter estimation algorithm based on adaptive process model is proposed, which solves the above key problems better.
As shown in Fig. 1, the method consists of two parts: one is Kalman filtering based on adaptive process model to estimate the system state, the other is updating the adaptive parameters in the adaptive process model using Yule-Walker algorithm. Therefore, more accurate models can be used to get more accurate estimates, and at the same time, more accurate estimates also can be used to get more accurate models, thus forming a closed-loop circuit.
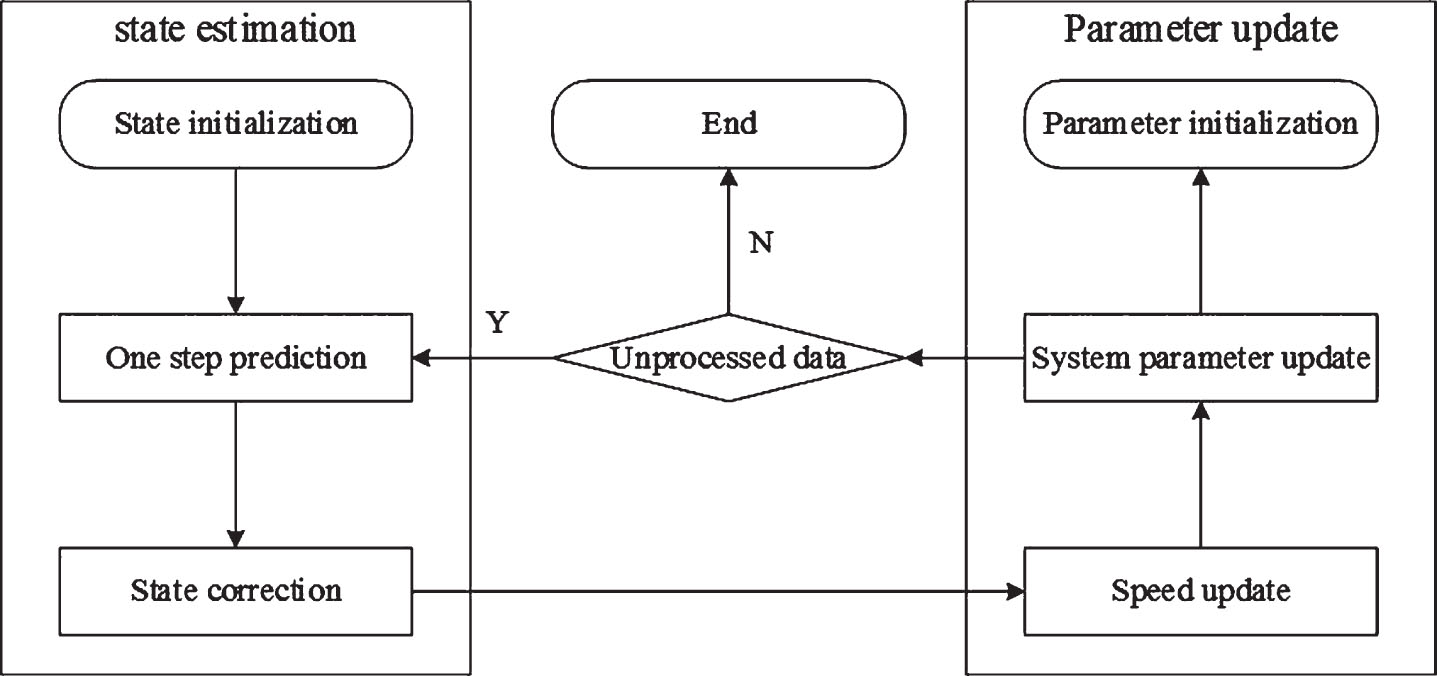
Flow chart of estimation algorithm based on adaptive process model.
In nature, the random variation of atmospheric wind speed leads to the turbulent motion of the atmosphere, and the random variation of atmospheric temperature causes the random variation of atmospheric density and atmospheric refractive index. The cumulative effect of these changes leads to the obvious inhomogeneity of the atmospheric refractive index profile. When a beam propagates in a turbulent atmosphere, its wavefront fluctuates randomly, which results in a series of atmospheric turbulence effects such as beam jitter, intensity flicker (fluctuation), beam expansion and image point jitter. In laser communication system, atmospheric scintillation can cause the random fluctuation of detection current of receiver, which leads to the increase of noise of detection system. The atmospheric scintillation intensity obeys a certain probability model in time, so that the noise of the detection system caused by it obeys a certain probability model intime.
Based on the above two improvements, we propose an estimation algorithm based on second-order adaptive model for systems with low-order dynamic characteristics. It is known that the model of velocity is:
Formula
Two improvements are made in the second-order adaptive process model on the basis of the third-order adaptive process model. Among them, adding the concept of velocity mean can make the model more difficult to diverge, and changing the order of the model to 2 makes it more suitable for the data of low-order dynamic characteristics. The flow chart is shown in Fig. 2:

Flow chart of estimation algorithm based on two order adaptive process model.
On the other hand, adaptive Kalman filtering algorithms are also introduced in the previous text. They can adaptively over-noise variance matrix, and can estimate the statistical characteristics of noise in the system very well. But it cannot adapt to non-linear systems or systems with strong fluctuation characteristics. Specifically, it is impossible to calculate the state transition matrix A (k) and input matrix U (k) of process model parameters in Kalman filter.
Generally speaking, process noise variance and measurement noise variance are the focus of adaptive Kalman filter, but few people pay attention to the characteristics of the system itself. In the study of maneuvering target model, the focus is on how to adapt to the characteristics of the system itself, but few people pay attention to the estimation of measurement noise. Therefore, this section is devoted to the study of a model that can extract the characteristics of the system itself and estimate the statistical characteristics of the system noise.
Finally, the estimated variance is obtained by correcting the predicted variance:
Finally, we need to identify two time-varying adaptive factors in the adaptive model, which are not only unknown, but also self-tuning. For this reason, the Yule-Walker estimation algorithm is used as mentioned above to adjust the adaptive factor.
Experimental data processing
The experimental data are the displacement data obtained from the actual measurement in the vibration experiment of a four-storey simulated building structure. The structure is a mixture of ChineseGrade345 steel and C30Grade concrete, as shown in Fig. 3:

Experimental device - low frequency vibration table.
After the field test, a number of experimental data were measured. Figure 4 shows the measured data and real data, totaling 52741 data. It can be clearly seen from Fig. 4 that the measured data contain a large amount of colored noise, and the signal-to-noise ratio is very small. The noise almost completely conceals the real signal.
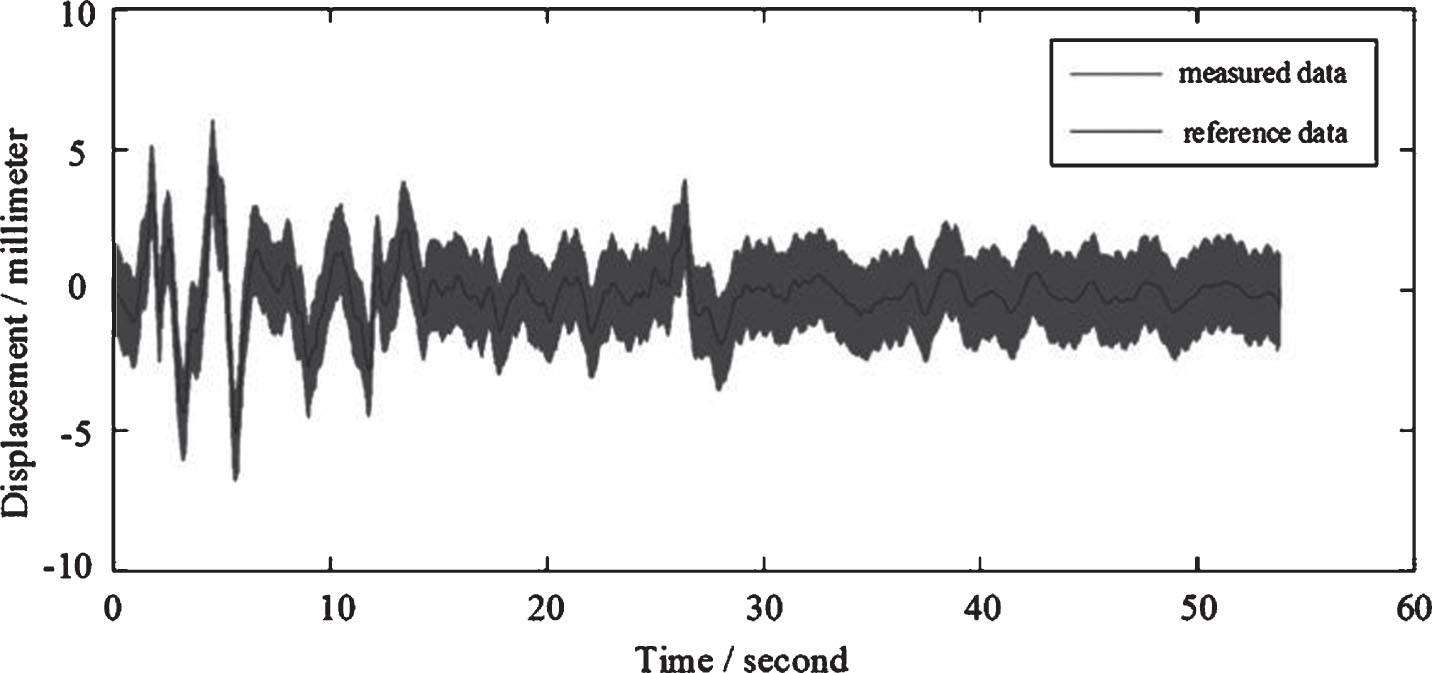
Comparison of measured data and real data.
In order to verify the superiority of the second-order adaptive process model, the classical algorithms proposed in recent years, namely the first-order exponential smoothing algorithm and Holt’t exponential smoothing algorithm, as well as the third-order adaptive process model, are selected to compare with them. At the same time, mean, variance and root mean square error are still used to evaluate these algorithms.
Firstly, the second-order adaptive process model is compared with the third-order adaptive process model proposed here (because the estimation effect of the third-order model is inferior to that of the second-order model, the fourth-order model is no longer tested). Secondly, the proposed algorithm is compared with the classical ones in recent years to prove the superiority of the proposed algorithm.
In order to verify the performance of the algorithm, a simulation experiment is carried out, which generates a set of simulation sensor data with order dynamic characteristics of colored noise. The fourth-order adaptive process model is used to filter the data containing colored noise. The third-order adaptive process model and the fourth-order adaptive process model are used to compare the filtering results. It has been proved that the fourth-order model is more suitable for the system with higher-order dynamic characteristics.
The estimation algorithm based on the third-order adaptive process model is difficult to match the real sensor data with the real sensor data. However, the estimation algorithm based on the third-order adaptive process model can extract the high-order dynamic characteristics of the real data, and has faster adjustment time.
The mean, variance and root mean square error of the above two algorithms are evaluated, as shown in Table 1:
Comparison of filtering performance of two algorithms
Comparison of filtering performance of two algorithms
From Table 1, it is clear that the estimation algorithm based on the fourth-order adaptive process model is more suitable for sensor measurement data with high frequency characteristics. It also accords with our expectation of model order selection.
First, in order to better compare the estimation results, we divided the data into five groups, each group of 10,000 data. The performance of the estimation algorithm is compared based on the second-order adaptive process model and the third-order adaptive process model. The results show that the estimation algorithm based on the second-order adaptive process model is better and has higher accuracy. By comparing the actual data with the filtered data, it is shown that the second-order adaptive process model has a good estimation effect.
In order to better prove this conclusion, more data groups are used to test the method. Each group contains 10,000 points. The total average of the last row represents the average of the whole data set. The test results are shown in Table 2. Obviously, for each group, the results of second-order adaptive process model are more accurate. It has good estimation performance in mean, covariance and root mean square error.
Comparison of estimation effects of two adaptive process models
Comparison of estimation effects of two adaptive process models
Overall, the variance and root mean square error of the second-order adaptive process model are only about 0.0223 and 0.1461, respectively, which are better than the third-order adaptive process model (0.1407 and 0.3129).
In Holt’s exponential smoothing filtering algorithm, two states are usually used: one is backward smoothing signal, the other is backward smoothing trend. Therefore, two parameters a and b are introduced, and b is set to 0.8 as the empirical value. At the same time, parameter a chooses the same set values as the first-order exponential smoothing filter, which are 0.2, 0.5 and 0.8, respectively, and uses the measured data of 2.3 sections of civil construction to estimate. The results are shown in Table 2.
It can be clearly seen in Table 3 that the best filtering effect can be obtained by using parameters a = 0.2 and b = 0.8, but the values of different indicators are still significantly larger than the adaptive method proposed in Chapter 3. Table 4 gives performance comparisons between different methods.
Performance of Holt’s exponential smoothing filter with different parameter values a
Performance analysis of several different estimation algorithms
It can be clearly seen that among the three online filtering methods, the error mean, covariance and root mean square error of the adaptive process model are the smallest, because the system parameters can be dynamically adjusted in the filtering process, and the process noise can be dynamically adjusted at the same time. In addition, by comparing the second-order adaptive process model with the third-order adaptive process model, a conclusion can be drawn that the effect of the second-order adaptive process model is more prominent when applied in this section, which is in line with our expectation of model order selection.
Taking Kalman filter estimation algorithm as the core of system state estimation, aiming at the modeling problem of Kalman filter estimation algorithm, several adaptive models are proposed there. The proposed state estimation algorithm is applied to the practical application of large-scale civil structure health monitoring, and the model is verified by experiments. The results show that two parameters a and b are introduced into the adaptive model, and b is set at 0.8 as the empirical value. At the same time, parameter a chooses the same settings as the first-order exponential smoothing filter, which are 0.2, 0.5 and 0.8, respectively. The measured data constructed by the model are used to estimate, and the simulation results are basically consistent with the theoretical calculation results given by the model calculation. However, the second-order adaptive process model is only applicable to the weak fluctuation region of x < 0.3, but not to the strong fluctuation region of x < 0.3. The results show that the proposed method has good robustness, real-time performance and accuracy, and can be well applied to the state estimation of systems with complex uncertain noise. There are still some shortcomings in the content, which need to be improved in the accuracy of the algorithm and estimation and recognition.
Footnotes
Acknowledgments
The author gratefully acknowledges financial support from Public Welfare Technology Application Research Program Project of Zhejiang Province (LGF18F020014).