
Abstract
A q-rung orthopair fuzzy model is a powerful framework for illustrating uncertainty and vagueness. This model is more practical, flexible and appropriate as compared to fuzzy, intuitionistic fuzzy and Pythagorean fuzzy models. Directed hypergraphs are utilized to execute higher-order relationships in communications and social webbing. In this research study, we design a new framework for manipulating q-rung orthopair fuzzy data by means of combinative theory of q-rung orthopair fuzzy sets and directed hypergraphs. We introduce certain new concepts, including q-rung orthopair fuzzy directed hypergraphs, dual directed hypergraphs, line graphs and coloring of q-rung orthopair fuzzy directed hypergraphs. Further, we implement some interesting concepts of q-rung orthopair fuzzy directed hypergraphs to real life problems.
Introduction
A large number of characteristics are possessed by directed hypergraphs [6], which are considered as the basis of various techniques used in mathematics. This generalization of digraphs has broaden the applicability of graph theory and directed hypergraphs have been demonstrated to be more effective and competent modeling frameworks. A number of tactics, which are based on directed hypergraphs, are significant to be used for practical purposes in several environments. An extensive utilization of certain types of directed hypergraphs can be seen in computer science as a mathematical framework to represent the complex structures in various domains. Zadeh’s [26] fuzzy set has been acquired greater attention by researchers in a wide range of scientific areas, including management sciences, robotics, decision theory and many other disciplines. Jiang et al. [9] proposed some applications to multi-attribute decision-making based on covering variable precision (I, T)-fuzzy rough sets. Novel decision-making methods based on bipolar neutrosophic information were proposed by Zhan et al. [27]. Atanassov [5] originated the notion of intuitionistic fuzzy set (IFS), which is distinguished by a truth-membership (T) and falsity-membership (F) satisfying the requirement that the sum of both membership degrees should not exceed 1 and is considered as an extension of fuzzy sets. However, in many practical decision-making problems, the sum of truth-membership and falsity-membership may not be less than 1, but the sum of their squares may be less than 1. To handle such type of difficulties, Yager [23, 24] proposed the concept of Pythagorean fuzzy sets(PFSs), as an extension of IFSs. A PFS is characterized by a truth-membership and a falsity-membership and these two memberships in PFSs are needed to satisfy the condition T2 (x) + F2 (x) ≤1, which shows that PFSs have expanded space to assign orthopairs as compared to IFSs. PFSs can deal various real life problems more effectively but still there are the cases which cannot be handled using PFSs. Take an example, the truth-membership and falsity-membership values suggested by a decision maker are 0.8 and 0.9, respectively. Then, the problem can never be handled by the means of PFSs as 0 . 82 + 0 .92 = 1.45 > 1. In order to deal with such type of cases, Yager [25] introduced the idea of q-rung orthopair fuzzy sets(q-ROFSs). A q-ROFS is represented by means of two membership degrees, one is truth and the other is falsity, with the characteristic that the summation of qth power of truth-membership and qth power of falsity-membership should not be greater than 1. Thus, q-ROFSs extend the concepts of IFSs and PFSs, so that the facts and figures can be dealt in a widen range. After that, Liu and Wang [13] developed and applied certain simple weighted operators to aggregate q-ROFSs in decision-making. Certain applications of q-ROFSs in decision-making have been discussed in [7, 12]. Interval valued q-ROFSs and their properties were proposed by Joshi et al. [10]. Wang et al. [22] proposed some q-ROF Muirhead means with their application to multi-attribute group decision making.
The ambiguousness in the representation of different objects or in the relationships between them generates the essentiality of fuzzy graphs, which were originally studied by Rosenfeld [20] and further developed by Kaufmann [11] in 1977. Singh et al. [21] studied the knowledge representation using interval-valued fuzzy formal concept lattice. Pramanik et al. [19] introduced fuzzy φ-tolerance competition graphs. Zhan et al. [28] introduced novel decision-making algorithms based on intuitionistic fuzzy rough environment. Covering based multigranulation (I, T)-fuzzy rough set models and applications in multi-attribute group decision-making were proposed by Zhan et al. [29]. Recently, covering-based generalized IF rough sets with applications to multi-attribute decision-making and fuzzy β-covering based (I, T)-fuzzy rough set models and applications to multi-attribute decision-making have been studied in [30, 31]. Valuable contribution on fuzzy graphs and fuzzy hypergraphs is presented in [15]. Certain characteristics and problems corresponding to fuzzy coloring of fuzzy hypergraphs were studied by Goetschel [8]. Zhang et al. [32] proposed the covering-based general multigranulation intuitionistic fuzzy rough sets and corresponding applications to multi-attribute group decision-making.
Parvathi et al. [17] originated the notion of IF hypergraphs. Later on, this idea was generalized by Akram and Dudek [1]. Parvathi et al. [18] introduced the concept of IF directed hypergraphs. Coloring of IF directed hypergraphs and its certain properties were discussed by Myithili and Parvathi [16]. Akram and Luqman [2], [3] introduced certain concepts of bipolar fuzzy directed hypergraphs, single-valued neutrosophic directed hypergraphs and studied their certain properties. The same authors also developed a new decision-making method based on bipolar neutrosophic directed hypergraphs [4]. Recently, Luqman et al. [14] have defined q-ROF hypergraphs and studied their applications.
The main objective of this work is to apply the concept of q-ROFSs to directed hypergraphs to deal uncertain orthopairs in directed hypernetworks. The motivation of this work is the wide applicability of directed hypergraphs in the designing of large, dense and optical networks. They have a large applications in circuit clustering, system analysis and pattern recognition etc. IF digraphs(IFDGs) and IF directed hypergraphs(IFDHGs) have been used in modeling of various networks, including neural network models and gas pipeline networks etc. An IFDHG model is an effective framework for handling the uncertainty in those orthopairs, whose sum is not greater than 1. But IF and PF models are failed to deal with such type of problems in which a decision-maker assigns the orthopairs expressing the degree of satisfactory and unsatisfactory, whose sum or square sum is not less than 1. To widen the range of such applications, we define q-rung orthopair fuzzy directed hypergraphs, in which the sum of qth power of truth and falsity-membership degrees should be less than 1. In this way, a wide range of vague information can be expressed through this model and we can adjust the value of q to decide the data expression range, thus q-rung orthopair fuzzy directed hypergraphs are more suitable for the uncertain environment. Moreover, our proposed model is more general as compared to IF and PFDHG models, because when q = 1, this model reduces to an IFDHG model and when q = 2, it reduces to the PFDHG model. Being motivated by these advantages of q-ROF models, in this paper, we introduce certain new concepts, including q-rung orthopair fuzzy directed hypergraphs, dual directed hypergraphs, line graphs and coloring of q-rung orthopair fuzzy directed hypergraphs. Further, we implement some interesting concepts of q-rung orthopair fuzzy directed hypergraphs to real life problems.
This paper is arranged as: In section 2, q-rung orthopair fuzzy directed hypergraphs, dual directed hypergraphs and line graphs are discussed. We explain the methods for finding the line graphs and dual hypergraphs of q-rung orthopair fuzzy directed hypergraphs. Section 3 deals with the interesting concept of coloring of q-rung orthopair fuzzy directed hypergraphs. We define the novel concepts of p-coloring,
q-Rung orthopair fuzzy directed hypergraphs
In this section, we define q-ROF digraphs and q-ROF directed hypergraphs. A q-ROF directed hypergraph generalizes the concept of IF directed hypergraph and broaden the space of orthopairs. We also define and construct the dual and line graphs of q-ROF directed hypergraphs. All these concepts are explained and justified through concrete examples.
Furthermore, π
Q
(x)=
When q = 1, 1-ROF digraph is called an IF digraph. When q = 2, 2-ROF digraph is called PF digraph.
5-ROF digraph
⋃
i
supp (Q
i
)=X, for all Q
i
∈ Q.
A q-ROF directed hyperedge ξ i ∈ ξ is defined as an ordered pair (h (ξ i ) , t (ξ i )), where h (ξ i ) and t (ξ i ) ∈ X - h (ξ i ), non-trivial subsets of X, are called the head of ξ i and tail of ξ i , respectively. A source vertex v in ξ i is defined as h (ξ i ) ≠ v, for all ξ i ∈ ξ and a destination vertex v′ in ξ i is defined as t (ξ i ) ≠ v′, for all ξ i ∈ ξ.
0 < T
ξ
(ξ
i
) ≤1 and 0 ≤ F
ξ
(ξ
i
) <1, vi-1, v
i
∈ ξ
i
, i = 1, 2, 3, ⋯ , n,
is called a q-ROF directed hyperpath of length n - 1 from v1 to v
n
.
If v1=v n , then this q-ROF directed hyperpath is called a q-ROF directed hypercycle.
The strength of connectedness between v1 and v2 is given as, λ∞ (v1, v2)=
A connected q-ROFDH is one in which we have at least one q-ROF directed hyperpath between each pair of vertices of
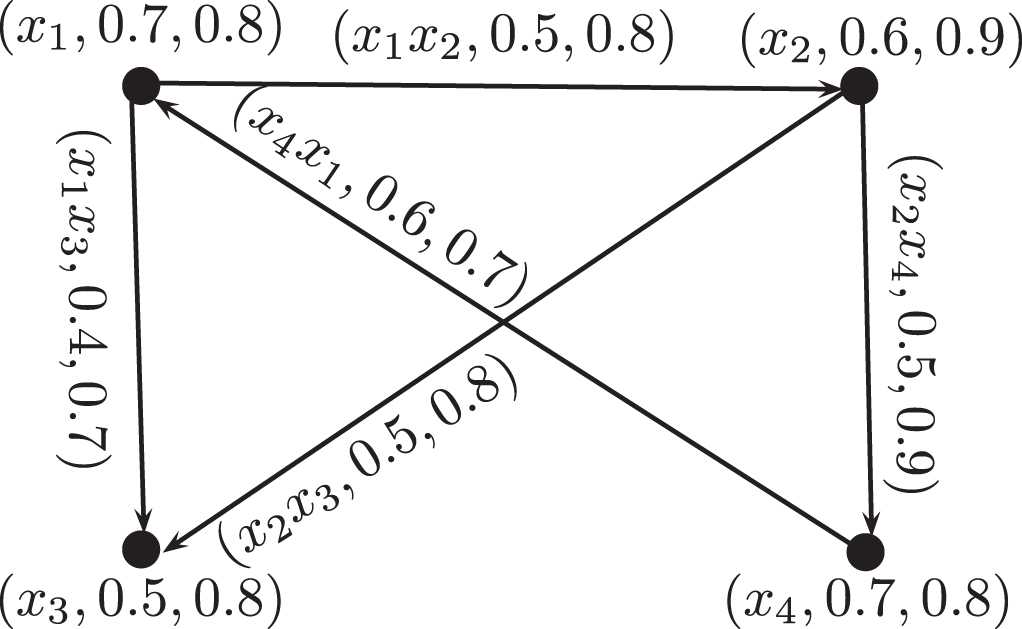
We now illustrate the Definitions 2.5, 2.6, 2.7, 2.8, 2.9 and 2.10 through an example of 5-ROFDH.
A 5-ROFDH.
In this 5-ROFDH, we have
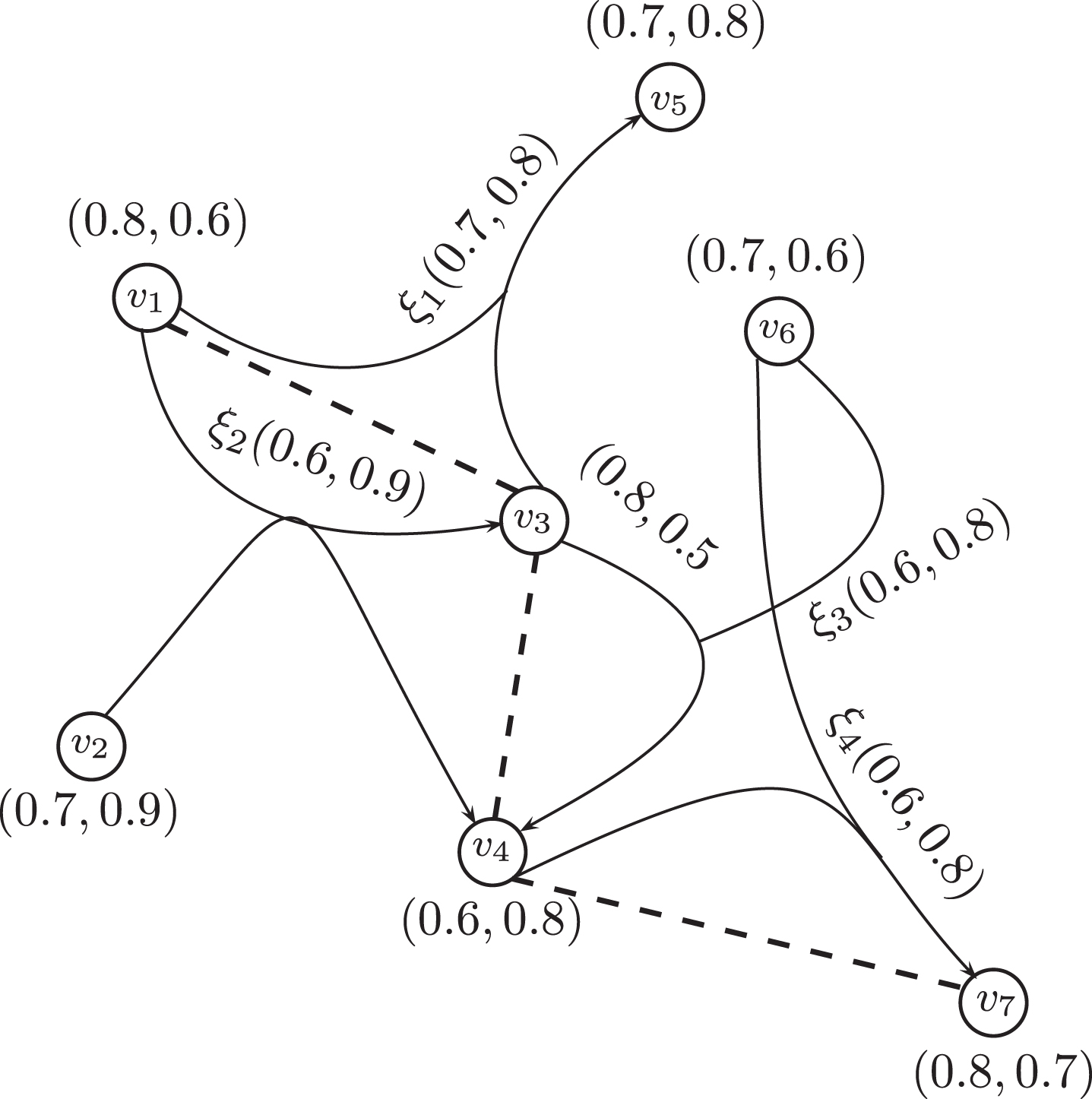
A 5-ROF directed hyperpath from v1 to v7 of length 3 is shown through dashed lines and is given by an alternating sequence v1, ξ2, v3, ξ3, v4, ξ4, v7 of distinct vertices and directed hyperarcs. The strength of this hyperpath is
Note that,

Backward and Forward 5-ROFDHs.
supp (ξ
i
) ⊆ supp (ξ
j
) ⇒ i = j, |supp (ξ
i
) ∩ supp (ξ
j
) |≤1.
That is, |supp (ξ
i
) ∩ supp (ξ
j
) |nleq1, for all ξ
i
, ξ
j
∈ ξ. Hence,
X
l
=ξ, {ξ
i
, ξ
j
}∈ ξ
l
⇔ |supp (ξ
i
) ∩ supp (ξ
j
) | ≠ ∅, for i ≠ j.
The truth-membership and falsity-membership of vertices and edges of X
l
(ξ
i
)=ξ (ξ
i
), T
ξ
l
({ξ
i
, ξ
j
})=min {T
ξ
(ξ
i
) , T
ξ
(ξ
j
) |ξ
i
, ξ
j
∈ ξ}, F
ξ
l
({ξ
i
, ξ
j
})=max {F
ξ
(ξ
i
) , F
ξ
(ξ
j
) |ξ
i
, ξ
j
∈ ξ}.
We now claim that
We now prove that By our supposition, membership degree of each vertex ε
i
of Suppose on contrary that |supp (ξ
i
) ∩ supp (ξ
j
) |= {ε
l
,ε
m
}, i.e., these edges have two incidence vertices in common, which is contradiction to the fact that
□
Hence,
Let
Input the number of directed hyperedges r of q-ROFDH Input the truth-membership and falsity membership of directed hyperedges ξ1, ξ2, ξ3, ⋯, ξ
r
. Construct a q-rung orthopair fuzzy line graph Calculate the degrees of membership of vertices Draw an edge between ξ
i
and ξ
j
in Calculate the degrees of membership of edges in
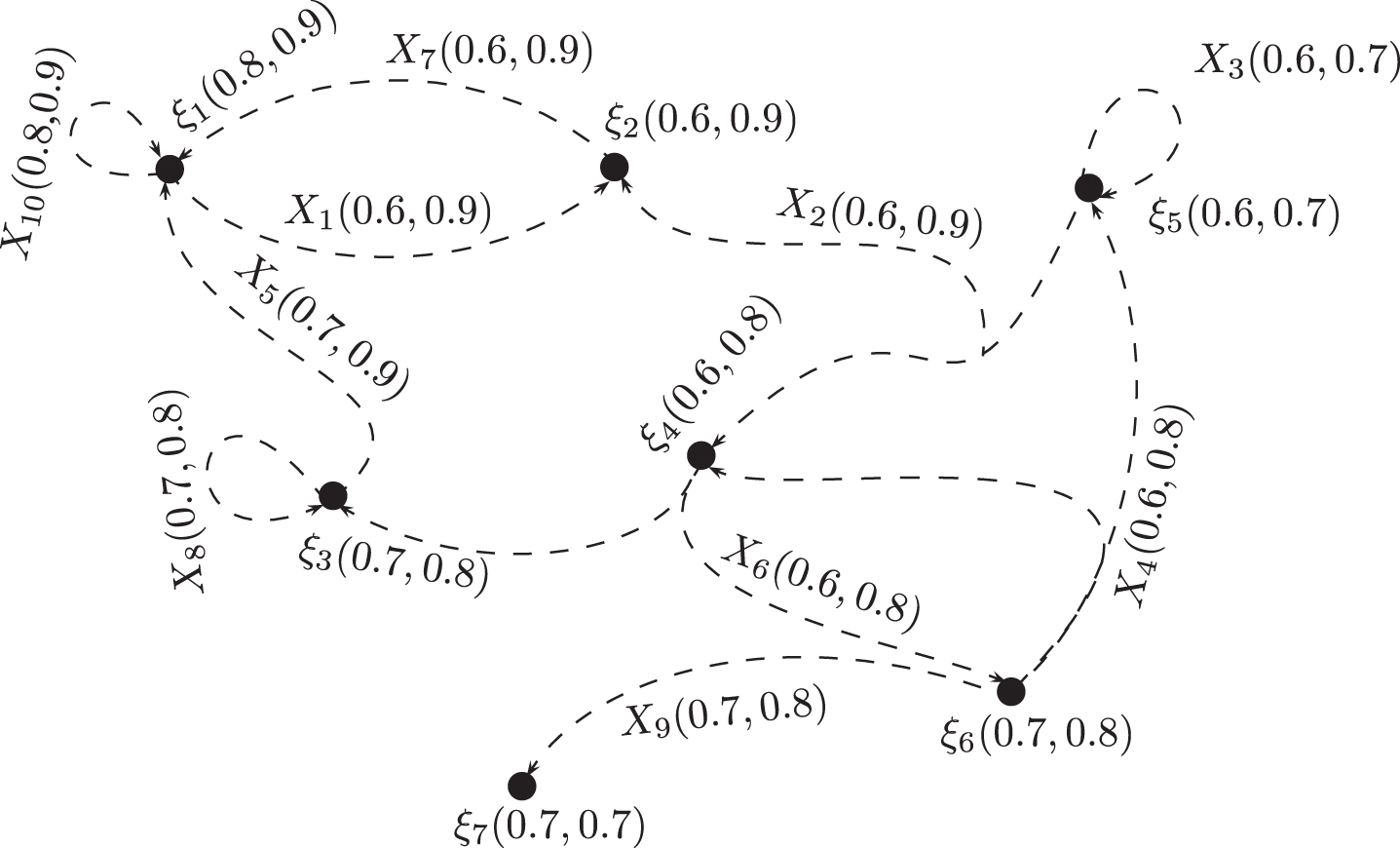
We now justify the Definitions 2.12 and 2.13 through Example 2.5.
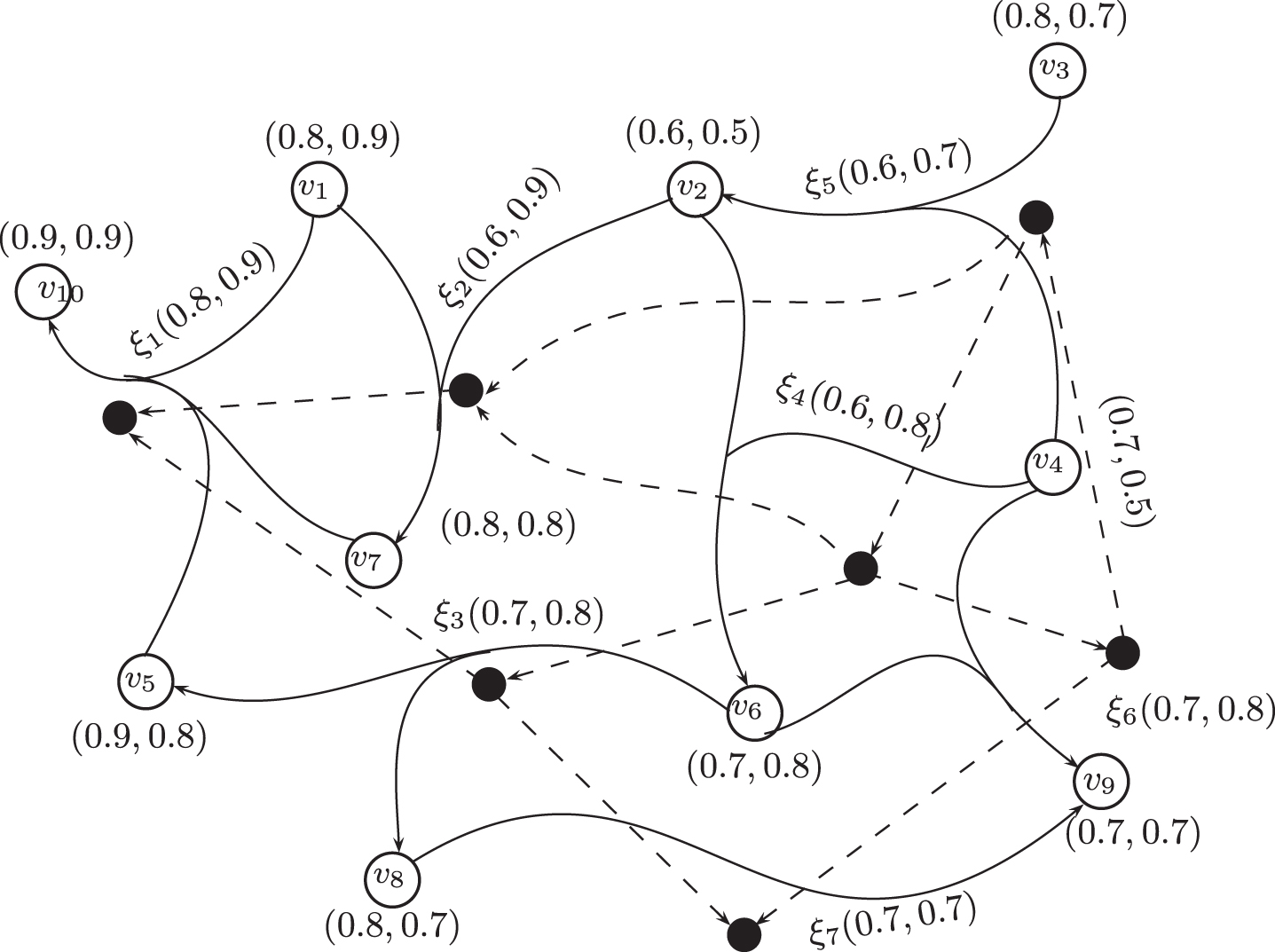
A 7-ROFDH and its line graph.
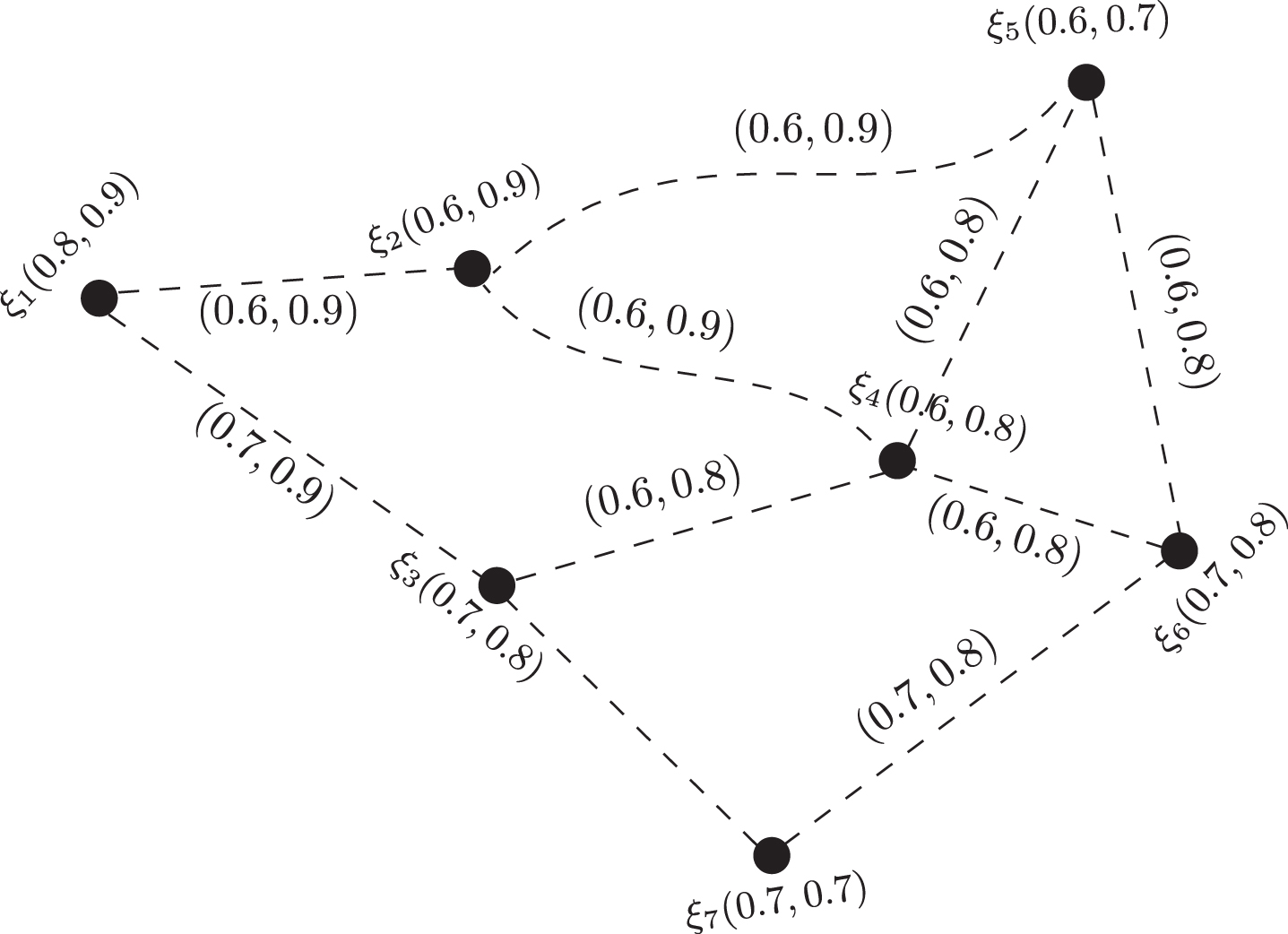
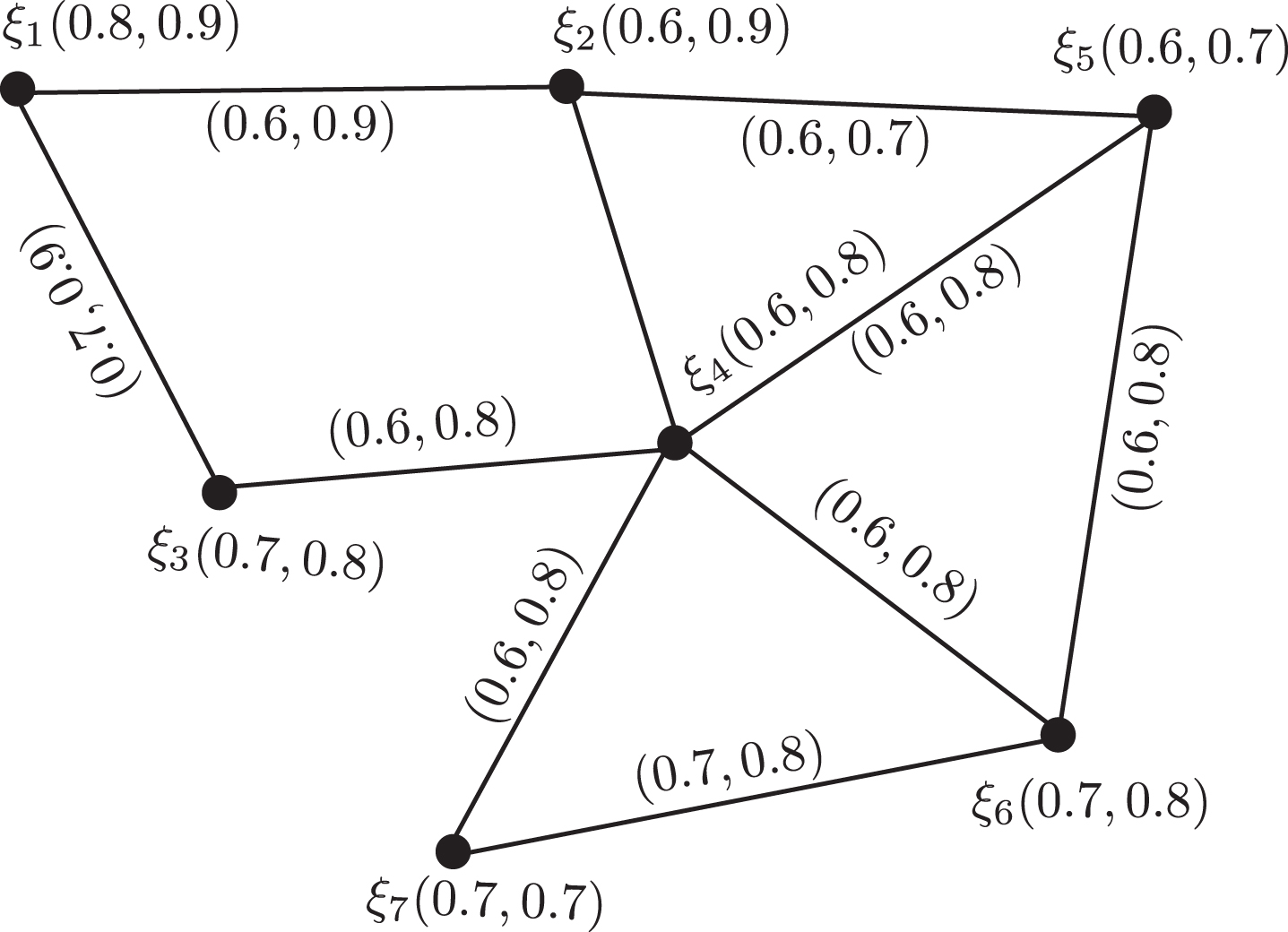
The 2-section graph of 7-ROFDH given in Figure 4 is shown in Figure 5.
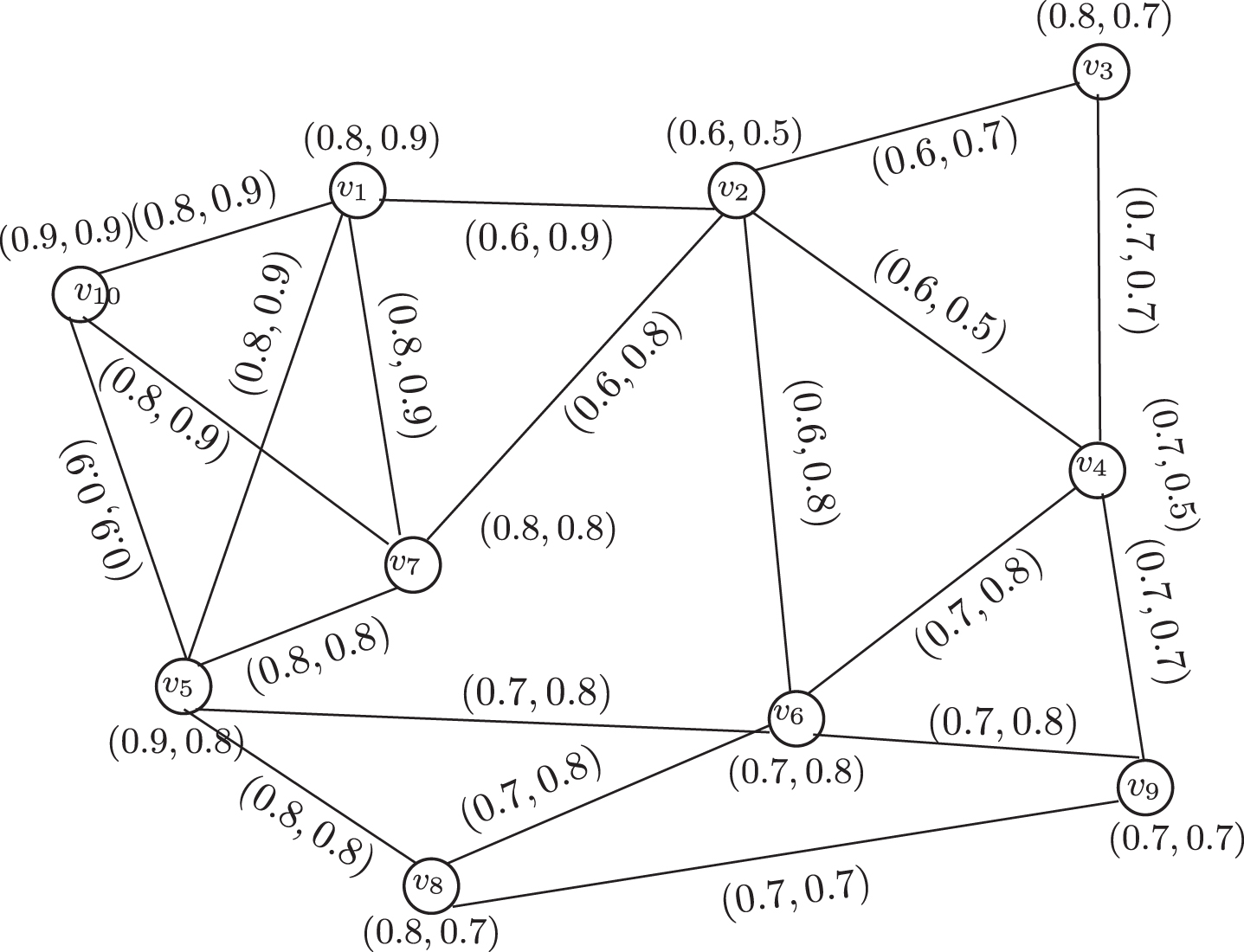
The 2-section graph of 7-ROFDH.
The membership degrees of X
i
are defined as,
The method of forming the dual of q-ROFDH is described in Algorithm 2. We also explain this concept through an example.
Let Input {v1, v2, v3, ⋯, v
n
} the set of vertices and {ξ1, ξ2, ξ3, ⋯, ξ
m
} the set of directed hyperedges of Formulate a q-ROFS of vertices of Define a mapping ψ : X → ξ, which maps the set of vertices to the directed hyperedges of Construct the directed hyperedges {X1, X2, X3, ⋯, X
n
} of Draw the q-ROF directed hyperedge, the vertex ξ
j
of Formulate the truth-membership and falsity-membership of directed hyperedges of
Dual directed hypergraph of 7-ROFDH.
We now justify the result of Theorem 2.3 through a concrete example.
The dual of
In this section, we define the (α, β)-level hypergraph of
ξ(α,β)= X(α,β)=
is called the fundamental sequence of
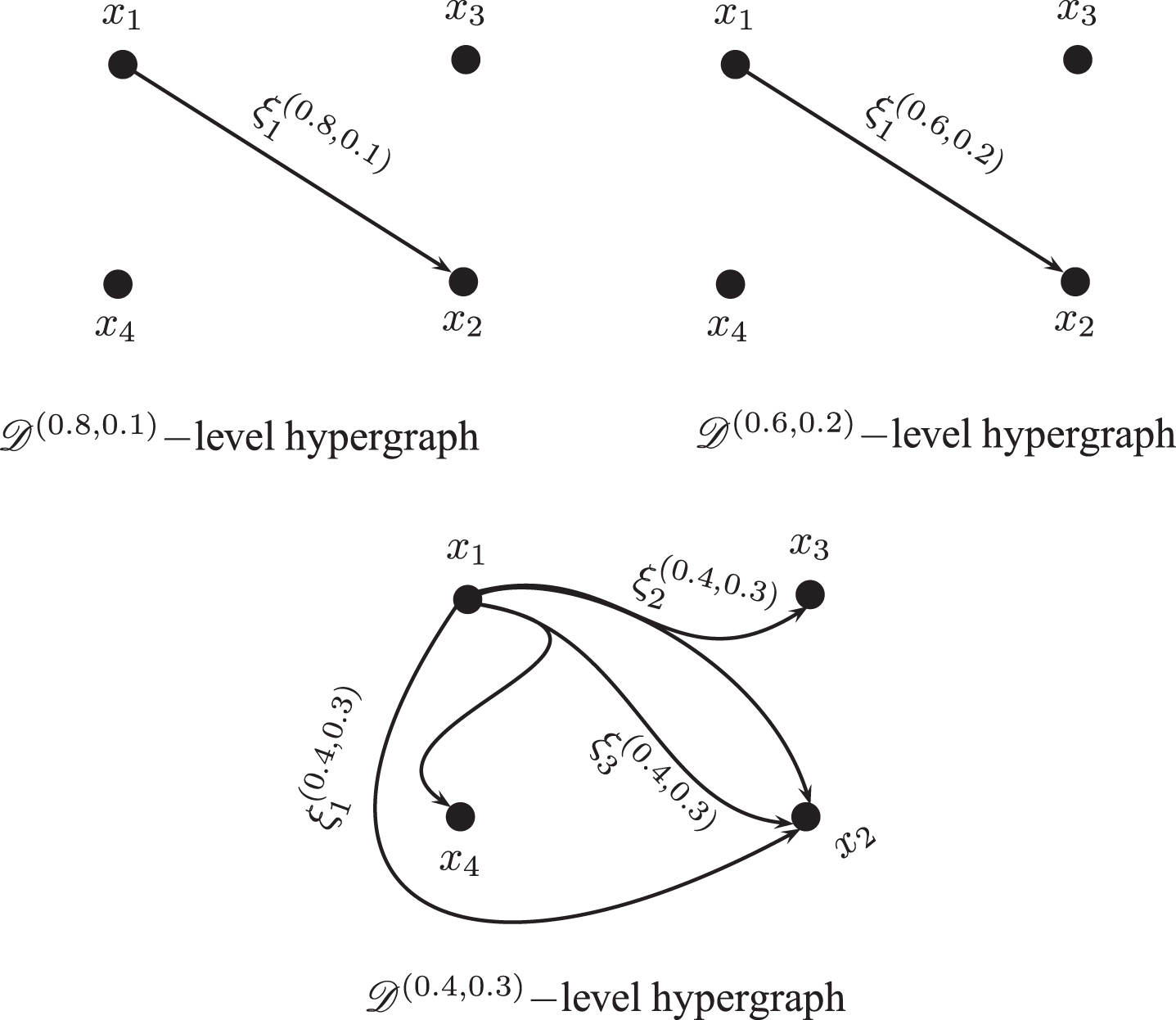
Fundamental sequence of
We now define the primitive k-coloring (or simply a p-coloring),
The minimum integer k, for which there exists a k-coloring of
Let ρ1=(0.6, 0.3), ρ2=(0.5, 0.2), ρ3=(0.30.1) and ρ4 = (0.2, 0.1). The corresponding ρ
i
-level hyperedges are given as follows,
Suppose {C1, C2} is a coloring of
min {q
i
, q
j
}=(0, 1), if i ≠ j, for every (α, β) ∈ (0, 1], for every (α, β) ∈ (0, 1], each hyperedge
Conversely, assume that there exists some
The coloring problem of
Obtain a partial hypergraph Subsequently, obtain a partial hypergraph By following the same procedure, obtain a partial hypergraph Following this iterative procedure, we obtain a subsequence of Construct the elementary q-ROFDH
if ξ
j
∈ ξ
s
then the family of hyperedges in ξ
s
having heights
□
The most proficient arrangement for hazardous chemicals
Hazardous waste is a type of waste that is considered to have potential and substantial threats to environment and human health. There are many human activities, including medical practice, industrial manufacturing procedures and batteries that generate the hazardous waste in various categories, including solids, gases, liquids and sludges. The improper arrangement of these hazardous wastes results in many serious tragedies. Serious health issues, including cancer, birth defects and nerve damage may occur due to improper handling for those who ingest the contaminated air, water or food. Remediation and cleanup cost of these hazardous substances may amount to millions and billions of dollars. To ensure the well being of population, protection of surrounding environment and to avoid any type of threat or hazard, proper management of hazardous chemicals is extremely important. Consider a 5-ROFDH model to illustrate the arrangements of some compatible and incompatible elements. The connections in this model describe the management system of these elements,i.e., only those chemicals are connected together through an hyperedge, which have some compatibility. A q-ROFDH can be used to well demonstrate the management system of hazardous elements. The 5-ROFDH model of some compatible and incompatible elements is shown in Figure 10. The set of oval vertices G={G1, G2, G3, G4, G5} of this directed hypergraph represents the types of those elements, which are adjacent to them. The description of these vertices is given in Table 1. For the cost efficient and secure management of hazardous elements, it is imperative to fill the containers up to 75% and also the container’s material should be compatible to the elements stored in it. Only those chemical substances are connected through the same directed hyperedges, which are compatible to each other and are not dangerous when stored together. For a proficient management of such elements, one should know the characteristics of hazardous elements such as corrosivity, reactivity or toxicity of these elements. A 5-ROFS Q describes the corrosivity of these chemical substances.
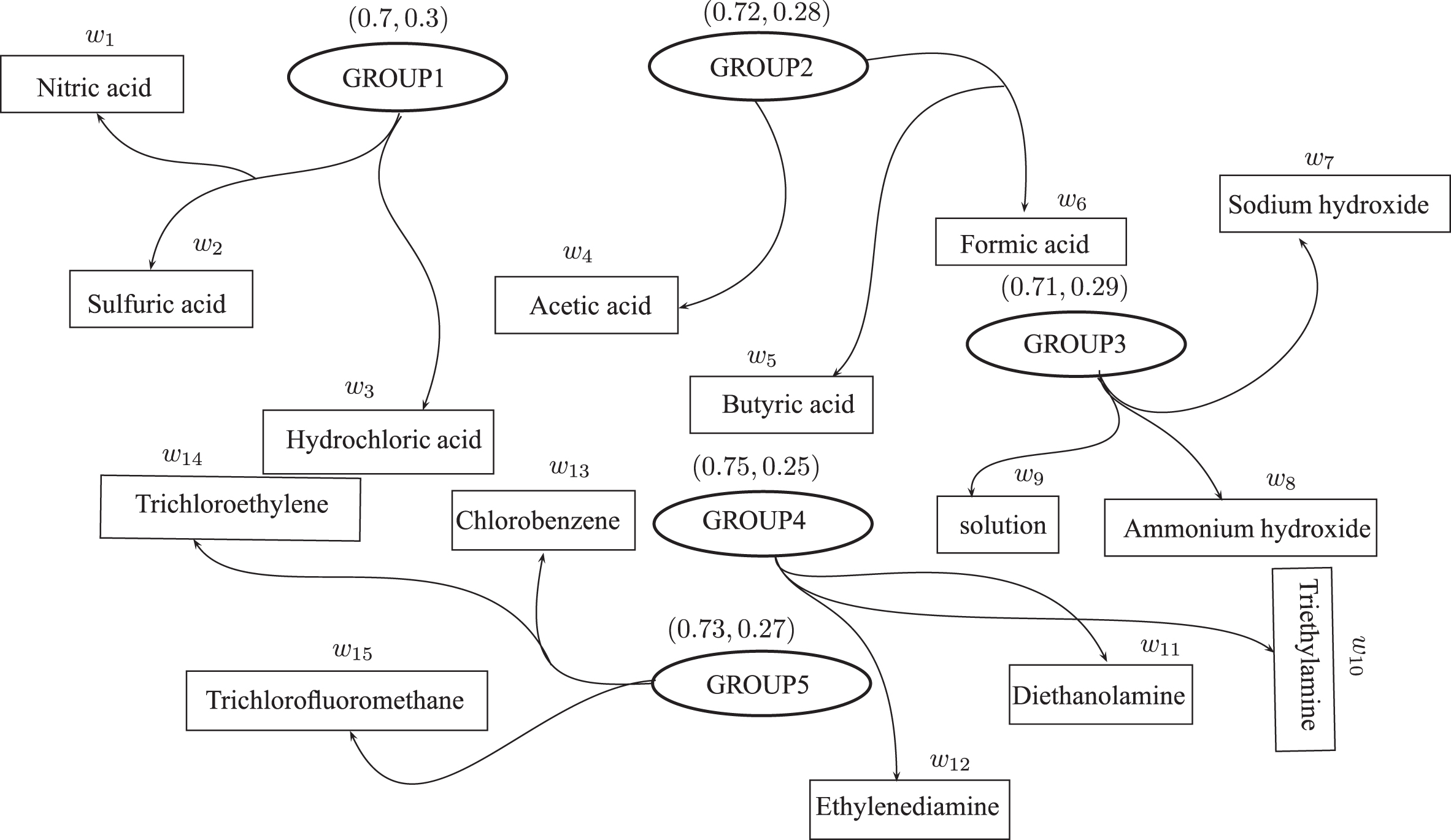
The arrangement for hazardous elements using a 5-ROFDH model.
Description of oval vertices
Table 2 describes the importance of defining this 5-ROFS. The containers which are holding these chemicals should be in good condition, non leaking and compatible and these wastes should not be kept in a container that is made of an incompatible material. For example, acids must not be stored in metal material, hydrofluoric acid should not be stored in glass and lightweight polyethylene containers should not be used to store or transfer solvents. Thus, one should make sure that containers possess high level of compatibility to chemicals. We now consider a set of containers/cabinets C={C1, C2, C3, C4, C5} and define five 5-ROFSs on C according to their compatibility with these elements. For example, the membership degrees C1 (G1)=(0.001, 0.980) implies that C1 container is made up of such material which is incompatible to store inorganic acids and suitable to store organic acids as C1 (G2)=(0.81, 0.23). Similarly, by taking the same assumptions, we define other 5-ROFSs as given in Table 3. We have followed the (max, min) strategy to find out the compatibility of containers to chemicals. For example, we note that the container C1 is made up of such material whose compatibility with different groups of chemicals can be checked through Table 3. The maximum truth degree and minimum falsity degree corresponding to inorganic acids concludes that C1 container is compatible to store these chemicals. Similarly, it can be noted from Table 3 that organic acids should be stored in C2 container as this is highly compatible to inorganic acids, so this storage will be most secure and risk less. Note that, the material of C2 is compatible to organic acids, caustics and halogenated compounds but we will use this container to store organic acids because truth-membership degree is greatest in this case. In the same way, we find that C3 is good for halogenated compounds, C4 is used to store amines and alkanolamines and C5 is suitable for storing caustics. The graphical representations of these storages is shown in Figure 11. We have proposed the simplest method to arrange the chemical substances and to store them safely. Thus, by taking the above model under consideration, hazardous chemicals can be systemized in a more appropriate and acceptable manner to reduce the precarious risks to human health and environment.
Corrosivity and Fortifying level of square vertices
Compatibility and incompatibility levels of containers to chemicals

Graphical representations of storages of chemical substances.
Collaboration is the demonstration of working as a team of members to achieve some piece of work, including research projects. Many organizations are realizing the significance of collaboration as a key factor to innovations. The collaborative work provides more opportunities for studying team-work skills and improves the personal and professional relationships. Here, we consider a few projects in chemical industry, which are assigned to different groups of trainees. A 7-ROFDH model is used to well demonstrate this collaborative activity of different teams/groups.
The project possessesing the powerful collaboration:
Consider the peculiar projects in the field of chemical industry, including Zero Energy Homes, Heat Exchanger Network Retrofit, Genetic Algorithms for Process Optimization, Progressive Crude Distillation, Water Management (for pollution prevention) and Design of LNG Facilities. The assignment of these projects to different groups is well explained through a 7-ROFDH as shown in Figure 12.
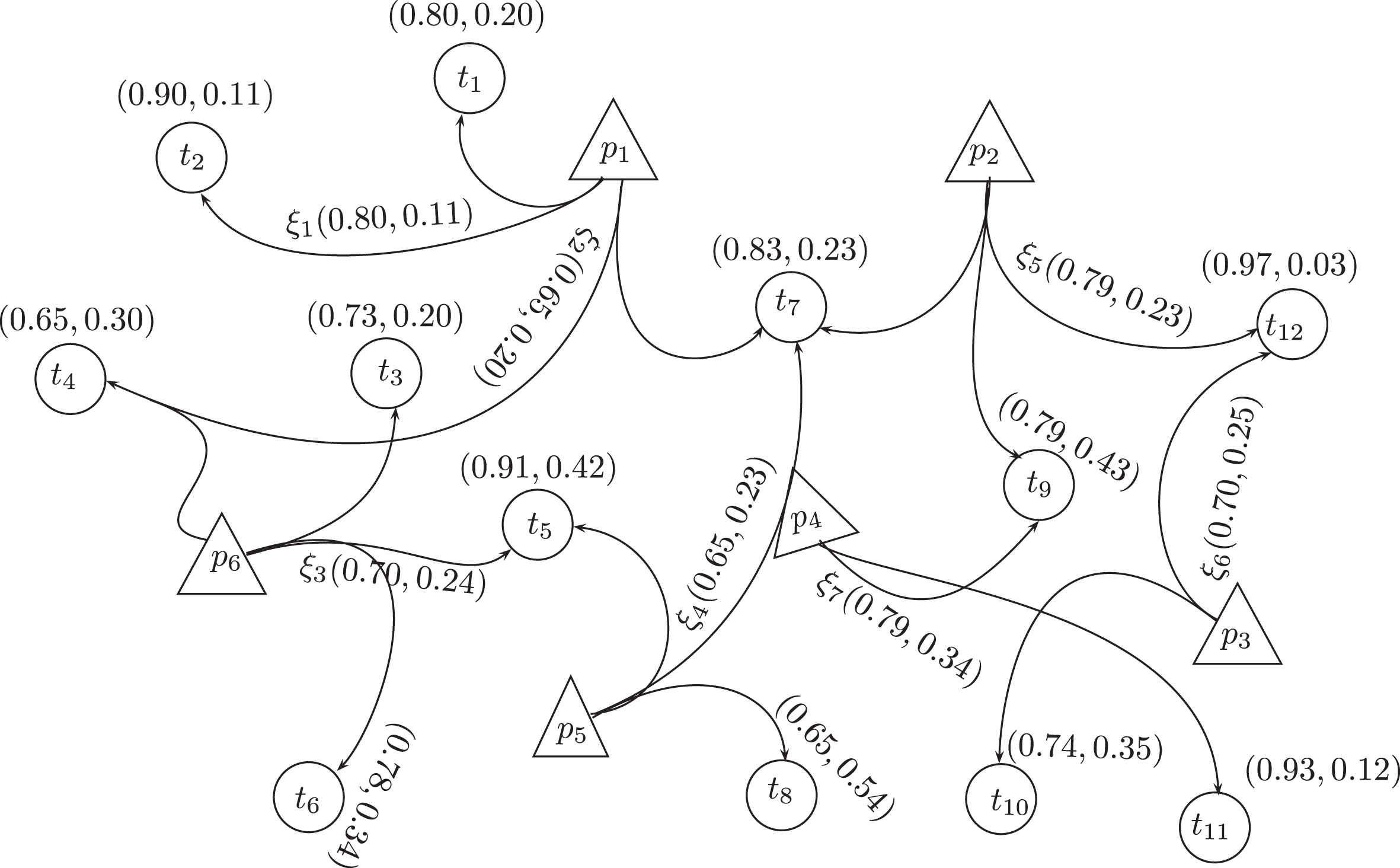
A 7-ROFDH to represent the assigned projects to trainees.
Note that, the set of triangular vertices {p1, p2, p3, p4, p5, p6} represents the projects that are considered to be worked on and the set of circular vertices {t1, t2, t3, t4, t5, t6, t7, t8, t9, t10, t11, t12} represents the trainees, to whom these projects are assigned. Each directed hyperedge connects the corresponding project to it’s allocated trainees. The projects assigned to different groups are illustrated through Table 4. Note that, collaborative competency levels of different teams narrate that how much mutual understanding is there between the members of corresponding teams towards their projects. For example, the trainees of “Zero Energy Homes" project have 65% collaborative competency, i.e., they give respect to each other’s ideas, contribution and acknowledge the opinions of other trainees and their collective strength to achieve the goal is 65%. Incompetency degree shows that they have 11% conflicts of ideas and opinions. Similarly, the collaborative competency of all other teams can be studied through the table. Now, to evaluate the strength of determination and competent behavior of all teams towards their collaborative project, we calculate the heights of all directed hyperedges, which are given in Table 5. The directed hyperedge having maximum height, i.e., maximum truth-membership and minimum falsity-membership will correspond to the most efficient team working in collaboration. Note that, ξ5 and ξ6 have maximum heights showing that {t7, t9, t12} and {t10, t12} share the most powerful collaborative characteristics. The method adopted in this part can be explained by a simple algorithm given in Table 6.
Collaboration capabilities of groups to projects
Heights of all directed hyperedges
Algorithm for powerful collaboration
Now, the line graph of the above 7-ROFDH can be used to determine the common trainees of distinct projects. The corresponding line graph is shown in Figure 13. The dashed lines between the projects demonstrate that they share some common trainees. The truth-membership and falsity-membership of these edges are given here.
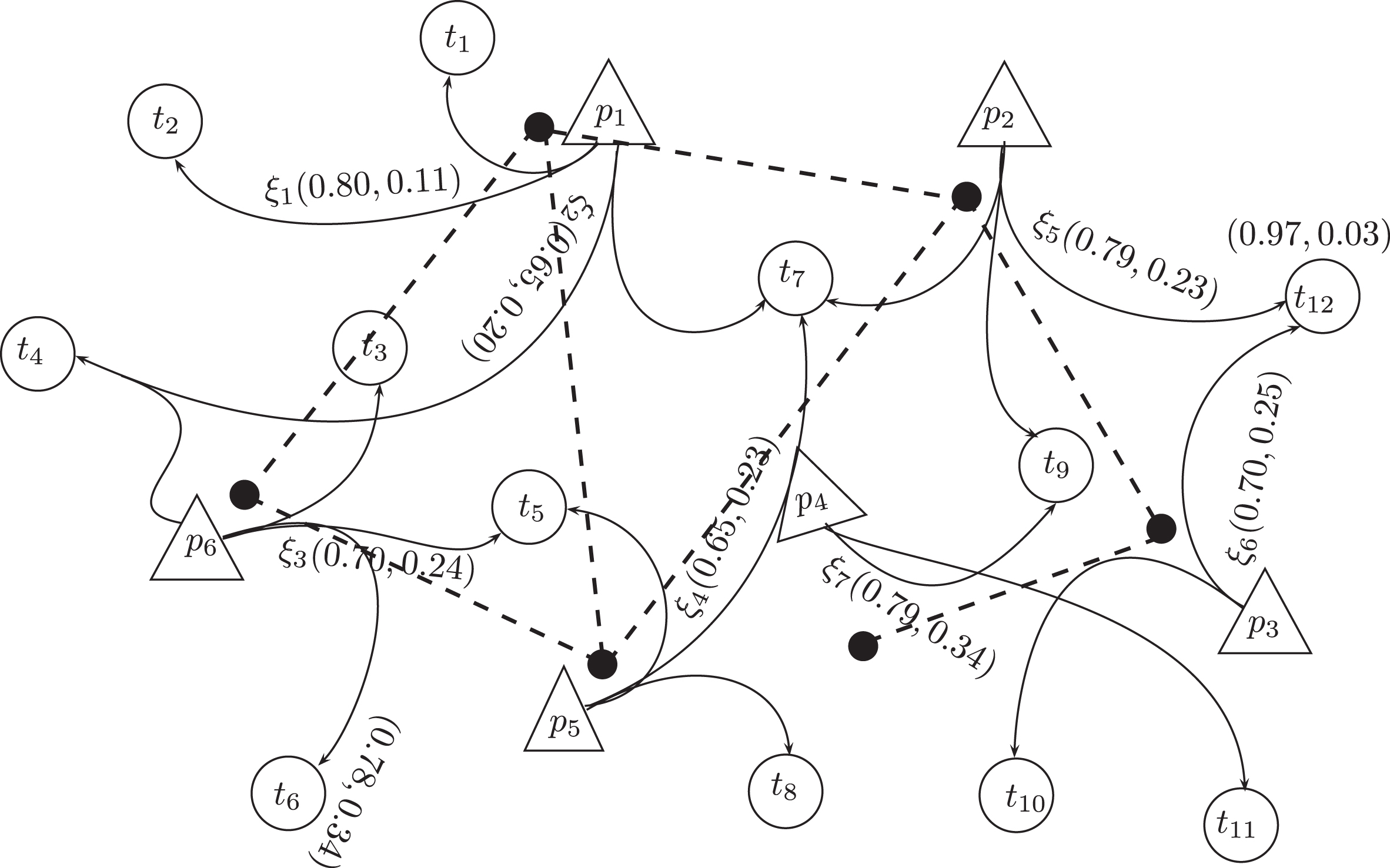
Line graph of 7-ROFDH model to illustrate the common trainees.
The enduring connection between projects
A q-ROF model is an extension of fuzzy, IF and PF models. This model deals with real life applications more precisely and adequately. There are various phenomena, which cannot be well described through IF and PF models. In such cases, q-ROF model is more effective and powerful as it enlarges the space of vague information and relaxes the condition on the sum of truth-membership and falsity-membership degrees. In this research article, we have applied the concept of q-ROFS to directed hypergraphs. Directed hypergraphs, as generalization of digraphs, appear very useful in various fields of research. They are used to model functional systems in computer science, to check functional dependency in databases, in expert systems and routing protocols. A wider range of fuzzy information can be expressed through the methods proposed in this paper and they can handle the data for which the sum of truth and falsity degree is greater than one. So their scope of application is wider and closer to the real decision-making environment. Moreover, our proposed model generalizes the IF and PF directed hypergraphs. Although, IF and PF directed hypergraphs are also a good way to deal with truth-membership and falsity-membership, but q-ROFDHs are more generic and flexible as compared to these models. A q-ROFDH model not only widen the range of uncertain information and data but also reduces to IFDH model, when q = 1 and to PFDH model, when q = 2. Thus, it is more beneficial to consider a q-ROFDH model to handle truth-membership and falsity-membership degrees appearing in directed hypernetworks. Since, the space of q-ROFDHs depends on variable q, as the value of q is increased, the range of applicability of our proposed model also increases. Thus, the orthopairs of IFDHs and PFDHs can be handled through q-ROFDHs but the converse does not hold when q ≠ 1, 2. We have described q-ROFDHs and some of their properties. We have discussed the coloring of q-ROFDHs. Further, we have illustrated some interesting applications of q-ROFDHs in real life problems to explain the flexibility of the model when the given data possesses the uncertain behavior. We aim to broaden our study, (1) Interval valued bipolar neutrosophic hypergraphs, (2) Fuzzy rough soft directed hypergraphs, (3) Fuzzy rough neutrosophic hypergraphs, (4) Hesitant q-rung orthopair fuzzy hypergraphs and (5) q-Rung picture fuzzy hypergraphs.