
Abstract
Salp swarm algorithm (SSA) is a meta-heuristic algorithm proposed in recent years, which shows certain advantages in solving some optimization tasks. However, with the increasing difficulty of solving the problem (e.g. multi-modal, high-dimensional), the convergence accuracy and stability of SSA algorithm decrease. In order to overcome the drawbacks, salp swarm algorithm with crossover scheme and Lévy flight (SSACL) is proposed. The crossover scheme and Lévy flight strategy are used to improve the movement patterns of salp leader and followers, respectively. Experiments have been conducted on various test functions, including unimodal, multimodal, and composite functions. The experimental results indicate that the proposed SSACL algorithm outperforms other advanced algorithms in terms of precision, stability, and efficiency. Furthermore, the Wilcoxon’s rank sum test illustrates the advantages of proposed method in a statistical and meaningful way.
Introduction
Meta-heuristic algorithm has been successfully applied to many optimization problems, such as image processing [1], feature selection [2], parameter extraction of solar photovoltaic models [3], path planning [4], etc. Due to the gradient-free characteristic, it shows better performance than traditional method on certain specific problems, and has received extensive attention from scholars [5, 6].
Generally speaking, the process of meta-heuristic algorithm to solve optimization problems can be divided into two stages: exploration and exploitation, in which the global and local search operations are carried out respectively. It is worth mentioning that the balance between these two stages is significant, which is related to the convergence performance of the algorithm. More exploration processes will lead to non-optimal solutions, while more exploitation processes will lead to local optimality. In fact, various algorithms have been proposed in succession because of their performance differences in different optimization problems. For example, an algorithm shows excellent performance in the field of multilevel image thresholding, but its ability in path planning is not necessarily outstanding. Algorithms proposed in recent years include but are not limited to: salp swarm algorithm (SSA) [7], grasshopper optimization algorithm (GOA) [8], sailfish optimizer (SFO) [9], seagull optimization algorithm (SOA) [10], emperor penguin optimizer (EPO) [11], moth search algorithm (MSA) [12].
Salp swarm algorithm (SSA) is a novel optimization algorithm proposed by Mirjalili in 2017, which is inspired from the swarming behavior of salps [13, 14]. There are mainly two types of salps in the population, namely leader and followers. The leader decides the direction of the population and the followers move along with each other. Although the SSA algorithm has been successfully applied into many engineering problems such as feature selection [15], and parameter identification of photovoltaic cell model [16], the performance of algorithm itself still needs to be improved to better suit complex problems. Faris et al. [17] proposed to use the crossover operator to replace average operator and enhance the exploratory behavior of SSA algorithm. The experiments result of 22 well-known UCI datasets and 5 feature selection comparing methods fully demonstrated the superiority of the proposed method on feature selection task. Zhang et al. [18] proposed an improved salp swarm algorithm based on Levy flight and sine cosine operator (called LSC-SSA) to solve high-dimensional largescale optimization problems, exhibiting remarkable performance on avoiding failing into the local optimum and obtaining ideal accuracy. These successful applications greatly stimulated our exploration for the improvement of this simple yet efficient algorithm.
In this paper, an improved version of SSA algorithm is proposed, which is known as SSACL. Crossover scheme and Lévy flight strategy are introduced to enhance the optimization capability. To be more specific, the crossover mechanism provides an alternative way to update the position of salp leader, which significantly improves the diversity and randomness of population. Lévy flight is added to the update formula of salp followers to guide the movement. With the occasional long step of Lévy distribution, the exploration ability of the SSACL algorithm has been improved to prevent falling into local optimum. Furthermore, the new updating formula refers to the position of food, which can improve the convergence effect of the algorithm to some extent. Compared to the previous approaches, our work pays more attention to the utilization of information about differences among population in order to guide individual updates. The crossover strategy scales the differences between two groups of random salps, not just the hard selection on the dimensions [17]. As for the Levy flight adopted, the information about food (i.e., approximate optimal solution) is referenced with the purpose of improving convergence capability, rather than only the location information of individual itself [18].
In order to evaluate the performance of proposed technique, various functions including unimodal, multimodal, and composite have been selected. Six state-of-the-art meta-heuristic algorithms are chosen for the experimental comparison. A non-parametric Wilcoxon’s rank sum test is also conducted to investigate the difference between algorithms. From the experimental results, it can be found that SSACL based method performs higher accuracy and better quality of solutions in general, which can provide technical support for solving practical engineering problems.
The structure of this paper is described as follows: Section 2 gives a brief review of traditional SSA algorithm and the pseudo code is included. In Section 3, the proposed method namely SSACL algorithm is presented in details and the flow chart is also given. A series of experiments and analysis are conducted in Section 4. Finally, the relevant conclusion and future work direction are presented in Section 5.
Salp swarm algorithm
Salp swarm algorithm is inspired by the swarming behavior of salps in nature. It is firstly proposed by Mirjalili to solve the problem of marine vehicles propeller optimization [7]. Just like other swarm-based techniques, the position vector of salp is defined in a d-dimensional space, where d denotes the number of decision variables of an optimization problem [19, 20]. Thus, the population X of n salp individuals can be represented by a n × d-dimensional matrix, which is shown in Equation (1).
There are two types of salps in the population, namely leader and followers. The leader decides the direction of the population and the followers move along with each other. And they form a chain structure called salp chain for better movement and foraging. The shape of salp individual and salp chain is presented in Fig. 1 [7]. Besides, the mathematical model is given as follows:

The shape of individual and chain of salps.
The position of the leader can be updated by:
The position of follower salp can be updated by:
Pseudo code of traditional salp swarm algorithm for optimization problem has been given in Algorithm 1.
In this section, a detailed introduction of SSACL algorithm is given. The optimization capability of the proposed algorithm is improved through two strategies. To be more specific, an efficient crossover scheme is used to increase the diversity of population. This part of SSACL can be regarded as a DE-like algorithm [21]. Besides, Lévy flight strategy is also introduced in the form of attempted motion, reducing the risk of falling into local optimum [22]. The flowchart of SSACL algorithm for finding the optimal solution is presented in Fig. 2.

The overall framework of SSACL algorithm.
In order to increase the randomness and diversity of the salp population, the crossover scheme is introduced into the original algorithm. Intuitively speaking, this strategy provides an alternative update method for salp leader, and the method of switching between the two methods is based on the parameter CR.
If the judgment condition of CR is satisfied, then the position of the leader of salps will be updated according to Equation (5). Scaling (i.e. SF) the differences between random individuals (i.e. (xr1 - xr2)) in the population increases diversity, while adding the difference vectors to the food vectors ensures the quality of the solution.
Lévy Flight is an effective search strategy of meta-heuristic algorithm, which has been successfully designed in many algorithms, such as the classical cuckoo search (CS) algorithm [23]. In SSACL, Lévy flight is introduced to enhance the search efficiency of the follower salps. After the improvement, the position of the salp individual can be updated as shown in Equation (6).
With the occasional long step of Lévy flight, the exploration ability of the SSACL algorithm has been improved to prevent falling into local optimum. Furthermore, the new updating formula refers to the position of food, which can improve the convergence effect of the algorithm to some extent.
In order to determine the optimal parameter settings of the proposed algorithm, experiments were performed on several benchmark test functions (see Tables 1–3). It is worth noting that the updating methods of parameters CR and SF are referred to [24], which has proved its superiority over other methods. The average rank with different combinations of SF and CR are given in Table 4. In this experiment, a lower ranking value indicates better performance. As can be observed, SF = 0.5 and CR = 0.9 present the best results in most cases; thus, this combination of parameter values was adopted in the following experiments.
The unimodal test functions
The multimodal test functions
The composite test functions
Average rank obtained by the proposed method under different parameter values
The flowchart of the proposed SSACL algorithm for optimization problem is given in Fig. 2.
Experimental setup
In this section, six meta-heuristic algorithms, such as the traditional SSA [7], differential evolution (DE) [21], sine cosine algorithm with Lévy flight (LSCA) [25], modified grasshopper optimization algorithm (MGOA) [26], improved differential search algorithm (IDSA) [27], and modified artificial bee colony (MABC) [28], are used to validate the superiority of proposed algorithm, whose parametric settings are presented in Table 5. Several benchmark test functions are utilized for the experiment, including unimodal, multimodal, and composite functions (see Tables 1–3). The 3D graphs of all functions are presented in Fig. 3, which can more intuitively reflect the shape and mode [29]. Note that all experiments are run 30 times to eliminate random errors. The population size and the number of iterations are set to 30 and 500, respectively.
Parameters of the algorithms
Parameters of the algorithms
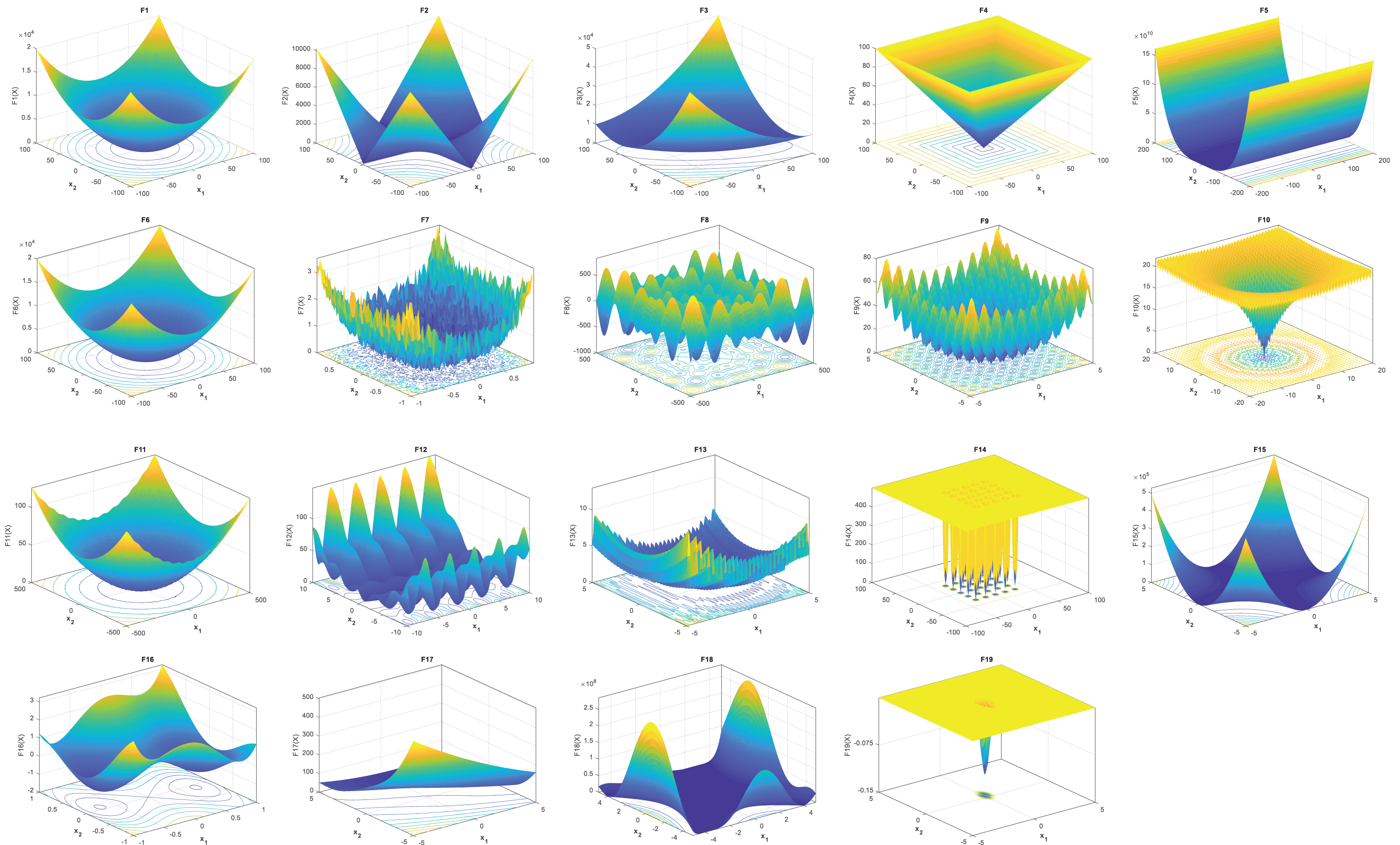
Three-dimensional diagrams of test functions.
The experiments are carried out through the simulation in “Matlab2017” and implemented on a computer with “Microsoft Windows 10” system and “8GB” memory space.
In this section, the performance of SSACL algorithm is tested in a series of experiments. Various performance measures are utilized for analysis, such as fitness function values, standard deviation (STD), and CPU time. Convergence curves and boxplots are also included to comprehensively evaluate the performance [30].
Tables 6–8 shows the fitness function values of all methods, including average, maximum, and minimum values. Note that the best average fitness function value among all algorithms are highlighted in
The comparison results of unimodal test functions
The comparison results of unimodal test functions
The comparison results of multimodal test functions
The comparison results of composite test functions
In order to verify the stability of proposed algorithm, the STD indicator is used. A lower value of STD indicates better stability. The STD values obtained by all algorithms are also presented in Tables 6–8. From the table it is found that SSACL based method gives lower values as compared to other algorithms, which shows the better consistency and stability of proposed algorithm. Furthermore, in order to reflect the performance of SSACL more intuitively, the convergence curves of odd number function (i.e. f1, f3, …, f19) are shown in Fig. 4. It can be found that the proposed algorithm outperforms other algorithms in general. In other words, the SSACL based method gives lower position curves. Whereas, the competing algorithms give the similar results in few cases, such as “f15” compared with MGOA algorithm.

The convergence curves of odd number functions (i.e.f1, f3, …, f19).
The average CPU time spent by each algorithm is shown in Fig. 5. It can be found that MGOA algorithm takes the longest time because it calculates the social component between grasshoppers. Compared with the traditional SSA algorithm, the introduction of Lévy flight and crossover scheme increases the steps of the algorithm, as well as the extra time. But on the whole, SSACL is more efficient than most algorithms, showing remarkable real-time performance.

The histogram of average CPU time of all algorithms.
Additionally, the boxplots of even number function (i.e.f2, f4, …, f18) obtained by all algorithms are drawn, which can be found in Fig. 6. The boxplot can reflect both consistency and location of the data distribution, corresponding to the stability and accuracy of the algorithm respectively. As can be seen from the results, SSACL algorithm shows absolute advantages over other algorithms in the optimization of f2, f4, f6, f8, and f10. In other cases, the performance of the proposed algorithm still ranks high, but the advantages are not as obvious as before (e.g. f16 and f18). Besides, fewer dead pixels in the boxplots also illustrates the excellent performance of the SSACL algorithm.

The boxplots of even number function (i.e. f2, f4, …, f18) obtained by all algorithms.
In this section, a non-parametric statistical test known as “Wilcoxon’s rank sum test” is used to evaluate the significant difference between algorithms [31]. The experiments are conducted 30 runs at significance level 5%. The average fitness function values for all algorithms are compared. The alternative hypothesis assumes that there is a significant difference between the two algorithms being compared and the results of which is represented as “p<0.05 and h = 0”. The null hypothesis considers that there is no significant difference between the algorithms and the “p” values are given in
The results of statistical experiments are given in Table 9. From the experimental results, we can observe that SSACL based method gives the satisfied results in general. More specifically, the proposed method gives better results in 18 out of 19 cases for SSA, 19 cases for DE, 19 cases for LSCA, 17 cases for MGOA, 18 cases for IDSA, and 19 cases for MABC. To sum up, the SSACL based method gives better results in 110 out of 114 cases (19 functions and 6 compared algorithms). The experimental results above are effectively proved the superior performance of proposed method, with statistical significance. However, as the no free lunch (NFL) theorem goes, there is no technique that can handle all optimization tasks [32]. Therefore, the application of SSACL based method is meaningful and potential.
Statistical analysis (Wilcoxon’s rank sum test) for the results of experiments on all functions
Statistical analysis (Wilcoxon’s rank sum test) for the results of experiments on all functions
A modified version of SSA algorithm is proposed in this paper, which is called SSACL. Crossover scheme and Lévy flight strategy are utilized to improve the movement patterns of leader and followers in the salp population, respectively.
In order to evaluate the performance of SSACL, the authors conduct a series of experiments on nineteen different mathematical functions, including unimodal, multimodal, and composite functions. Six state-of-the-art meta-heuristic algorithms are used for comparison. In addition, the non-parametric Wilcoxon’s rank sum test is adopted to evaluate the superior performance of proposed technique in a statistical and meaningful way. From the experimental results, it can be found that the SSACL algorithm can obtain the solutions more accurately, which is suitable for practical engineering problems.
In the future, we hope to introduce the crossover scheme and Lévy flight strategy into more meta-heuristic algorithms, and investigate their performance in the field of image processing. Besides, other improvement strategies will be used to improve the optimization capabilities of meta-heuristic algorithms, such as chaos initialization, opposition-based learning, Gaussian disturbance, etc.
Footnotes
Acknowledgments
This work was supported in part by the Sanming University introduces high-level talents to start scientific research funding support project (20YG14), the Guiding science and technology projects in Sanming City (2020-G-61), the Educational research projects of young and middle-aged teachers in Fujian Province (JAT200618), the Scientific research and development fund of Sanming University (B202009).