
Abstract
BACKGROUND:
Order picking activities are the most labor-intensive processes in retail warehouses. Although various automated order picking technologies have been developed recently, human intervention continues to be required. Most advanced order picking systems can be classified into automated storage and retrieval system (AS/RS) and moving robot types. Both types of goods-to-picker systems aim to reduce the picker’s travel time required to determine product locations and to move these products to meet customer requests.
OBJECTIVE:
Many studies on the efficiency and effectiveness of automated order picking systems have focused solely on system performance. Since human operators play an essential part in order picking systems from both the effectiveness and efficiency point of view, the work-related risk factors for the workers interacting with these systems should also be evaluated. In this paper, we assess the ergonomic design features of two system types, a moving robot (MR) and automated storage and retrieval system (AS/RS), focusing on the assessment of the risk factors for work-related postural stresses.
METHODS:
We compare the performance factors of two order picking systems, i.e. MR and AS/RS, by applying a digital human modeling and simulation, and assessing the total average physical activity exhibited by human operators on a given order picking task.
RESULTS:
The AS/RS type order picking system exhibited a lower risk for task-related postural stresses for warehouse workers.
CONCLUSIONS:
The picking station for moving robot (MR) order picking system requires design changes in order to reduce postural stresses during human operator’s interaction with such a system.
Introduction
Order picking tasks in retail warehouses consist of lifting, moving, picking, placing, packing, and other additional procedures. Automation has been widely introduced into various areas of the warehouse, and most order picking procedures have been automated. However, human intervention continues to be required because customer requests are diversifying, and the demand for small-quantity orders is increasing; thus, order picking tasks in retail ware-houses require greater flexibility. Order picking activities are the most labor-intensive processes in retail warehouses [1]. From a human labor perspective, although these activities are simple and easy, most of them are repetitive and have specific physical requirements. Consequently, they may lead to musculoskeletal disorders (MSDs) in human pickers.
Various order picking systems have been used in the field for decades, but after Amazon’s Kiva system was introduced, interest in this area of res-earch increased. Order picking systems evolved into robot-human co-work systems that integrated task automation. Initially, automation systems were computer aided systems—such as lights, barcodes, and conveyers—that automated functions. More recent order picking systems bring goods to the picker. Because goods-to-person systems rely on transporting goods to specific pickup positions, the moving distance of order pickers in the warehouse is greatly reduced. Instead of moving to the warehouse to take products off of a rack or shelves, operators work in specially designed fixed worksites that handle high production volumes. This process leads to repetitive motion and less exposure to work tasks diversity [2]. The working condition of human workers of automated warehouse order picking systems are very similar to the automobile assembly lines, as it is characterized by high degree of automation with high number of manual tasks [3].
Many studies on the efficiency and effectiveness of automated order picking systems have focused on system performance. Although humans are essential actors in order picking systems, and are key factors for both their effectiveness and efficiency, the human factors in these systems have rarely been evaluated. Several studies have been carried out on ergonomic factors in order picking systems and have primarily focused on conceptual frameworks or planning considerations [4]. Khadan et al. [5] studied Occupational MSDs Using Fuzzy TOPSIS for assessing of repetitive tasks.
A principal benefit of automation is that it can reduce human workloads, both mental and physical [6]. Order picking systems can reduce the physical workload for human workers to a large degree [7]. Robots in order picking systems are mainly tasked with information acquisition, moving to stock she-lves, and bringing stock bins to human workers. Acc-ordingly, in order picking systems, human workers are usually tasked with finding the correct items from stock bins or shelves and placing them in order bins. This process requires fewer human tasks than manual order picking. However, it does not translate to a reduction in working hours. Human workers still must engage in repetitive physical work—pulling items and putting them in bins—for long durati-ons [8]. This repetition affords less opportunity for change and recovery through worker discretion, shortening cycles, or performing repetitive low-int-ensity operations [9, 10]. The evaluation of human factors in automated systems is more complex and sensitive than that of total manual work [11], even if the systems are designed by considering ergonomics and human centered design factors [12].
In this paper, we focus on real-world applications in this field. We compare the ergonomic design features of two system types, a moving robot and automated storage and retrieval system (AS/RS), focusing on assessment of the risk factors for work-related postural stresses (WRPS).
Human tasks in order picking systems
There are various types of automated order picking systems that can be categorized on the basis of their technologies and configurations. The most advanced systems are goods-to-person order picking systems, which can be classified into four types [13], namely: Mini-load AS/RS, carousel AS/RS, shuttle-based AS/RS, and robotic rover system (moving robot type).
The mini-load AS/RS system picks and places the individual loads from/in storage cells within the shelves. When the loads are taken from the various storage cells, they are then delivered to output bays, which direct the loading units to another area within the system for picking, packaging, or shipment. The systems are equipped with one or more storage bays according to picking requirements. Carousel AS/RS extend the functionality of the traditional horizontal carousel systems by adding a robotic extractor to the front end. By doing so, they are also capable of stacking multiple units to capture the full clear height of the facility. These systems can handle both cartons and containers, but require the load to be extracted and conveyed to another location for picking and replenishment.
By replacing the AS/RS crane with multiple shuttles that operate simultaneously within an aisle, these systems have greatly increased the flexibility and throughput of the traditional small load AS/RS systems. They are capable of handling either cartons or trays, and move can be designed to be captive within the aisle or to extract the load for processing elsewhere. Additional shuttles can be added on the basis of the throughput requirements. These systems, introduced just several years ago, have recently gained substantial traction. Figure 1 shows a typical configuration of a shuttle based order picking system. In a robotic rover system, as shown in Fig. 2, a robot moves the shelving units from a storage location to a location where the ordered items will be picked manually and then returns the shelving units to a storage location [14]. The moving robots are able to work continuously and more efficiently than their human counterparts [15, 16].
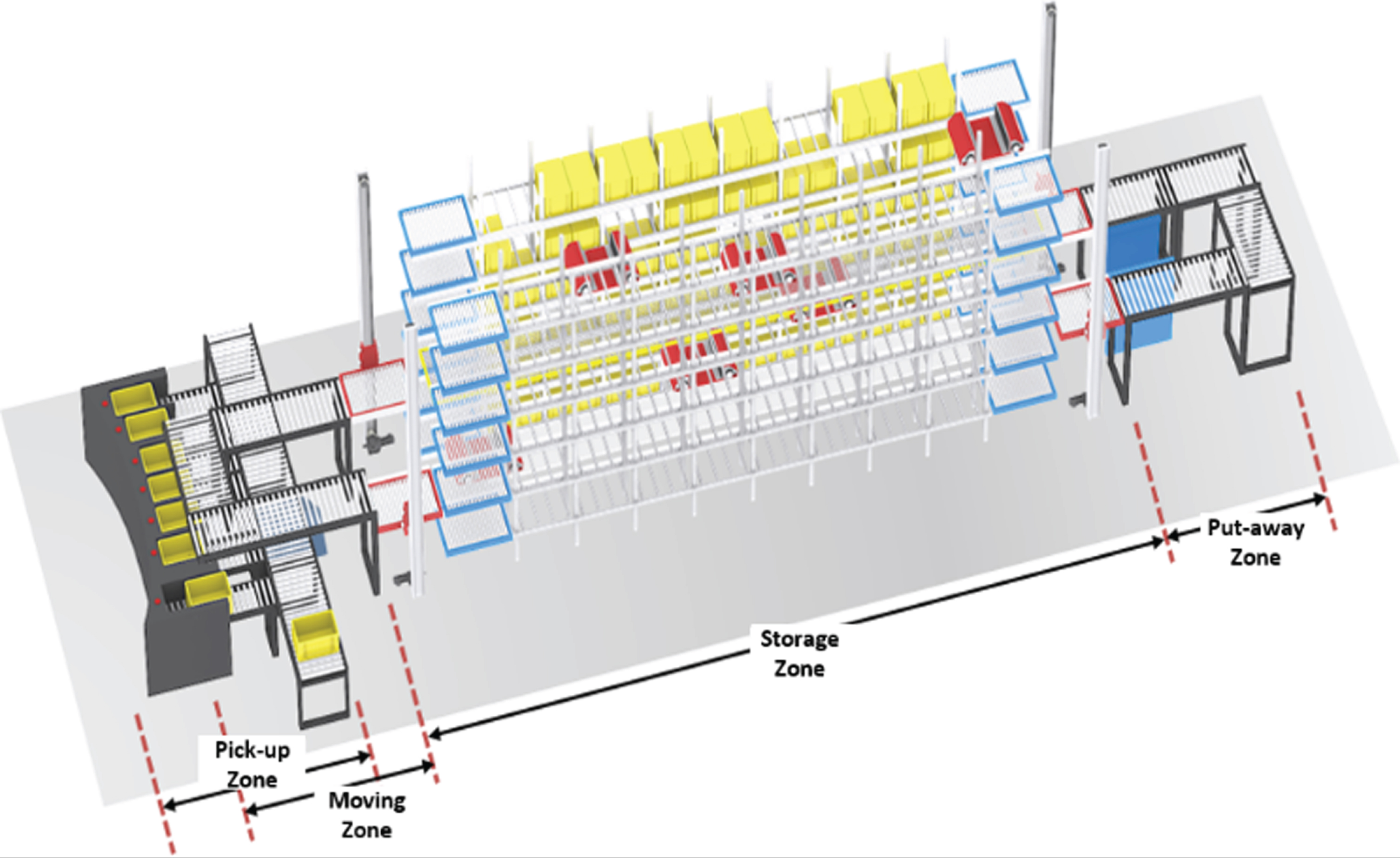
Shuttle based order picking system.

Robotic rover order picking system (Kiva systems), source: www.roboticstomorrow.com.
From a typical warehouse operation perspective, the advantages and disadvantages of each system are shown in Table 1 below. An order picking station for human workers should be placed at the end of each system. However, there is an important difference between the robotic rover system and the other three systems. The other three systems use various storage/retrieval methods and movement techniques, but they all use bins, boxes, or totes. In a robotic rover system, in contrast, the robot moves a shelf to the picker. For human workers, the two picking systems require different physical activities.
Comparison of order picking systems
In AS/RS type order picking systems, totes or boxes containing goods for customer orders are retrieved from storage racks or shelves and transported by conveyor or moving vehicles to the picking station. When the totes enter the picking station, they are scanned, and the monitor in front of the human worker shows the quantity of items according to each customer’s order [17].
The picker at the picking station takes the items from the stock tote and places them into order bins. There are various forms and configurations of AS/RS order picking systems, but the picking station for human workers typically looks like the configuration in Fig. 3. A stock bin containing items arrives in the middle of the station. Then the picker checks the monitor indicating the quantity of items for the customer’s order and takes the items out of the stock bin. The order bins are placed on both sides of the stock bins. The picker then moves the picked items to the order bin and puts them into the order bin.
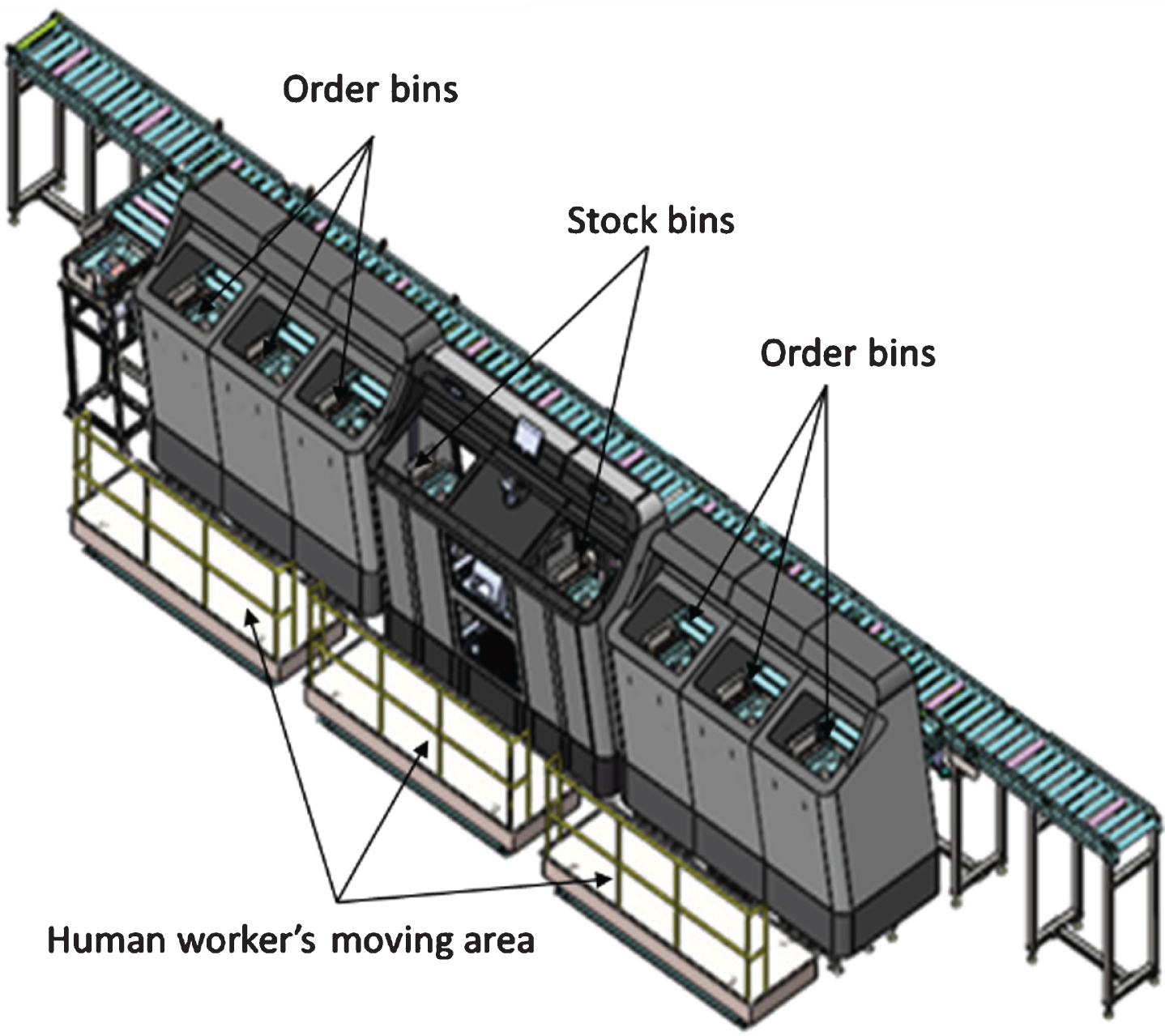
Picking station for an AS/RS type order picking system.

Research procedures.
In a moving robot type order picking system, autonomous moving robots are used to move the goods from inventory zones to the human workers, who perform picking tasks [18]. Figure 4 shows a picking station for a moving robot type order picking system that includes a storage shelf, which is brought by the robot, and order bins [19]. If the robot enters the picking station with the storage shelf, the light on the cell that contains items to be picked flickers, and the picker takes the items off the shelf. Then the picker turns around and places the items into the order bins according to the customer’s order.
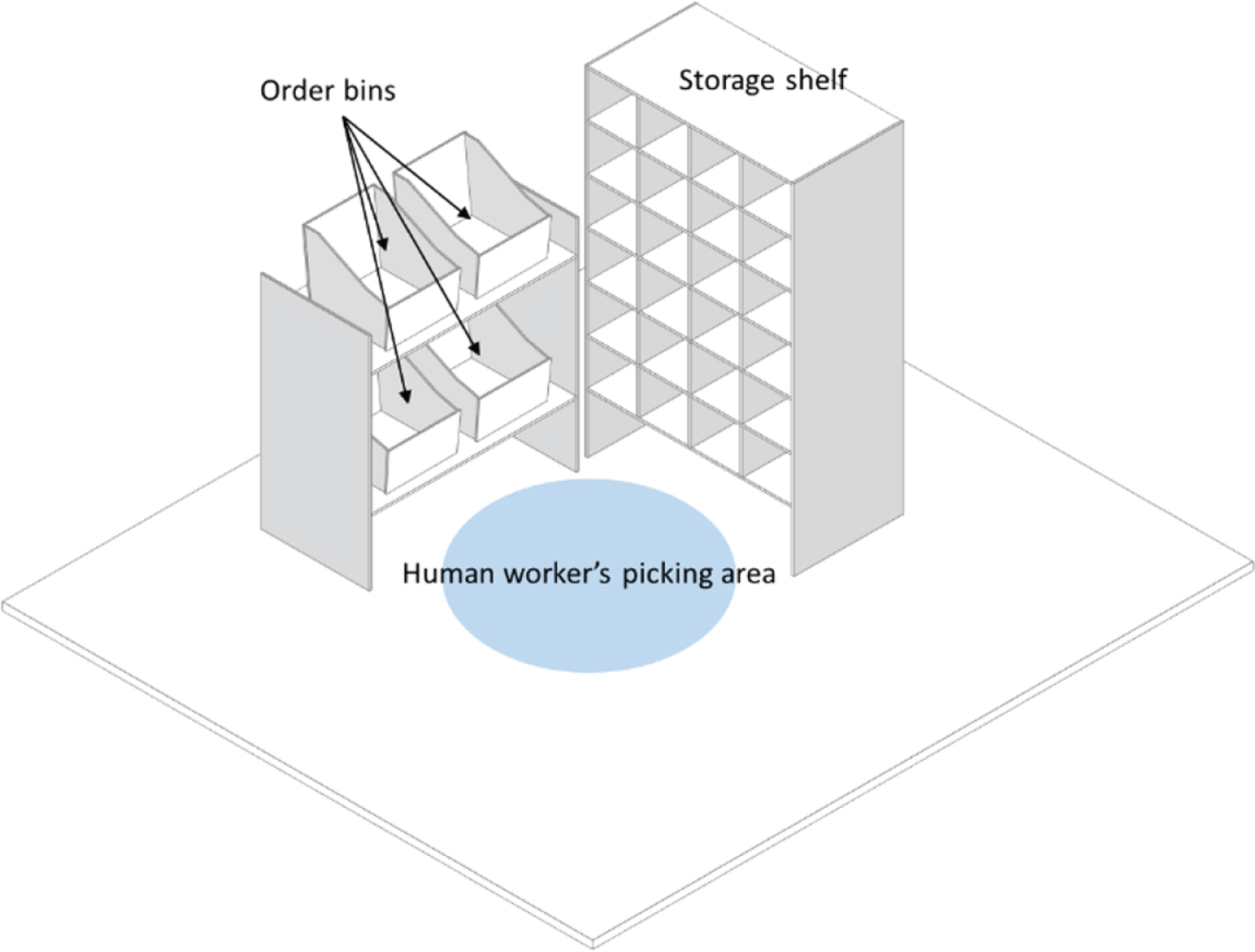
Picking station for a moving robot type order picking system.
The purpose of this study was to conduct an ergonomics assessment of two types of warehouse order picking systems by two different testing methods. First, we conducted virtual simulation modeling for two orders picking systems by using the DELMIA HUMAN application and derived the musculoskeletal risk factors [20]. The RULA scores for both systems were derived from simulation modelling, and a biomechanical assessment was used to select the disorder risk factors and muscles. The simulation was built in a 3D virtual environment, and the manual order picking process for two different order picking systems was evaluated. The RULA technique is an observational technique that has been used for assessing body postures from visual data. Among observation techniques, OWAS, REBA, and RULA are the most widely used for evaluating manual material handling tasks. Previous research on these three techniques by Kee and Karwowski [21] has shown that the OWAS and REBA techniques underestimate posture related risk, as compared with RULA.
Second, EMG tests were used to assess muscle activity for human operators in two order picking systems. In many cases, EMG tests are performed in the laboratory by keeping a particular work posture static in order to measure physical activity level of the given work position [22]. The order picking operator assumes and repeats similar, but not identical working positions. Manual material handling tasks have combined static and dynamic components and utilize different groups of muscles [23]. We applied EMG analysis for a particular task postures that were linked a sequence of actions to produce a continuous task activity. The experiment was focused on total physical activity task content rather than an individual posture basis. We used simulation modeling and then selected the muscles to assess the extent of physical activity of the operators on a given task. For this purpose, an experimental laboratory environment for testing of the mock-up design of the goods-to-picker systems was developed. We then compared the EMG-based muscle activity experimental testing results with the simulation results.
Task simulation
Subjects and tasks
Warehouse order picking tasks involve handling relatively light weight items, as compared with those in many other manual material handling tasks. In this study, the subjects for the digital human model were female retail warehouse workers. From videos available from YouTube (www.youtube.com) showing Amazon’s warehouse, we classified the movements of pickers in Kiva systems, which are moving robot type order picking systems. For AS/RS type order picking systems, we created a virtual workstation with reference to various AS/RS manufacturers.
Simulation modeling
An order picking task at a picking station consists of three steps. From a worker’s point of view, the worker first picks the items from a shelf or a stock bin and then checks the items and moves to the order bin/box. Finally, the worker places the items into the order bin. On the basis of our observations from the videos, we classified the picking tasks of the Kiva system into three types, as shown in Fig. 6 [24].

Tasks for simulation modeling from a moving robot type order picking system (Kiva system).
Task A was an order picking task that included stretching the arms above the shoulders to pick an item from a high shelf. Task B was modeled as picking an item from a shelf at a height between the worker’s knees and shoulders. Task C required the worker to kneel because the item was on a lower shelf. In AS/RS type order picking systems, the picking postures were so similar in all cases that we modeled only one picking task, as shown in Fig. 7. This task included picking, walking to the order bin, and placing items into the order bin. All postures were in a standing working position [25].

Tasks for simulation modeling from an AS/RS picking station (task D).
The risk levels of working postures were evaluated with the RULA included in DELMIA HUMAN, which was developed to examine individual workers’ exposure to risks associated with work-related upper limb disorders [26]. The RULA analysis examined the following risk factors: number of movements, static muscle work, force, working posture, and time worked without a break. These facors together provided a final score ranging from 1 to 7. Table 2 shows the RULA criteria [27]. Table 3 presents the RULA final scores for the human worker risk assessment of the two types of order picking systems. As mentioned above, the picking tasks for the moving robot type order picking system were classified into three types according to the worker’s picking posture. During the task simulation, the RULA scores were recorded according to the time flow. The score range was 3–7.
RULA evaluation criteria
RULA evaluation criteria
Final RULA scores during the simulations of each order picking system
Tasks A and B produced the highest score, 7, indicating dangerous postures that might result in increased musculoskeletal complaints and potentially personal injury. Figure 8 shows all of the postures that exhibited 5 or more points. Table 4 presents the RULA score details for specific body parts. Posture A is the picking activity in which the human worker stretches her arms and picks items placed on a high shelf. Because this posture places substantial pressure on the neck, trunk, and legs, a high score is marked. Postures B and D are the activities in which items are placed in a tote box, and the risk factors affect the wrists and arms (score: 5). Posture C is the picking activity in which items are picked from a low shelf. Because the worker should kneel, high scores result for the neck, trunk, and legs.

Simulation results—RULA high score postures.
Final RULA score of each posture
In moving robot order picking systems, improvements can be achieved by eliminating kneeling and stretching of the arms above the shoulders. Working conditions have been suggested to be improved by adjusting equipment and changing stock allocation strategies. To eliminate kneeling, lifting devices can be integrated into picking stations. Likewise, changes to stock allocation strategies considering the order frequency may decrease the risks associated with stretching activities. However, both the economic and ergonomic aspects of warehouse management should be considered. Further studies are needed to more effectively improve working conditions.
This simulation shows that in ergonomic terms, AS/RS type order picking systems have lower risk levels for human worker MSDs. Postures A and C indicate a need for immediate change. Most retail warehouses handle small and lightweight goods, but repetitive material handling activities expose workers to physical disorders, because of the gradual and cumulative deterioration of the musculoskeletal system [28]. To lower risk levels for human workers, workstation adjustments should be considered [29].
The purpose of this part of the study was to analyze workers’ muscle activity related to specific working postures during simulated picking order tasks performance in both the moving robot system and the picking desk system.
Subjects and tasks
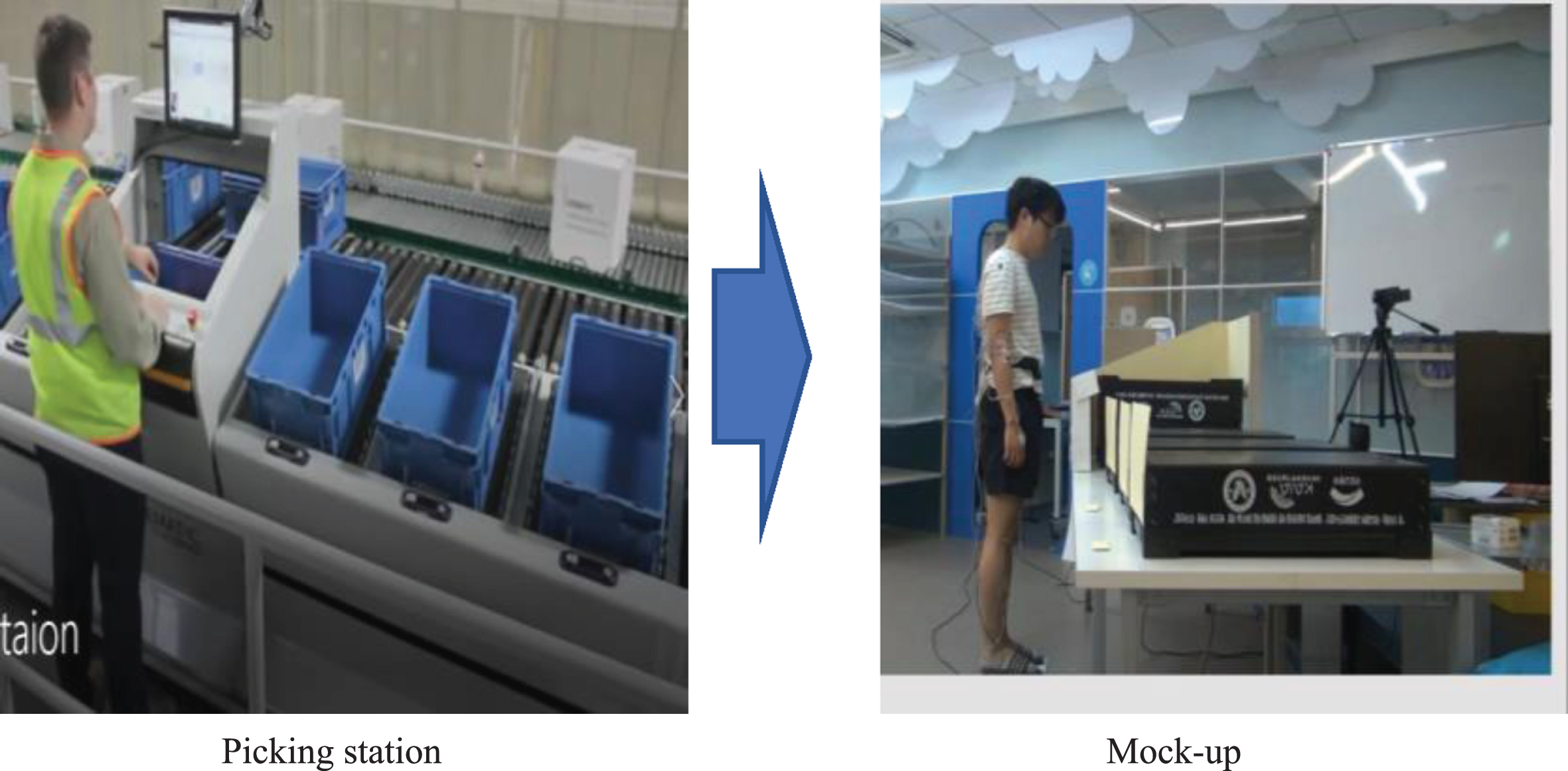
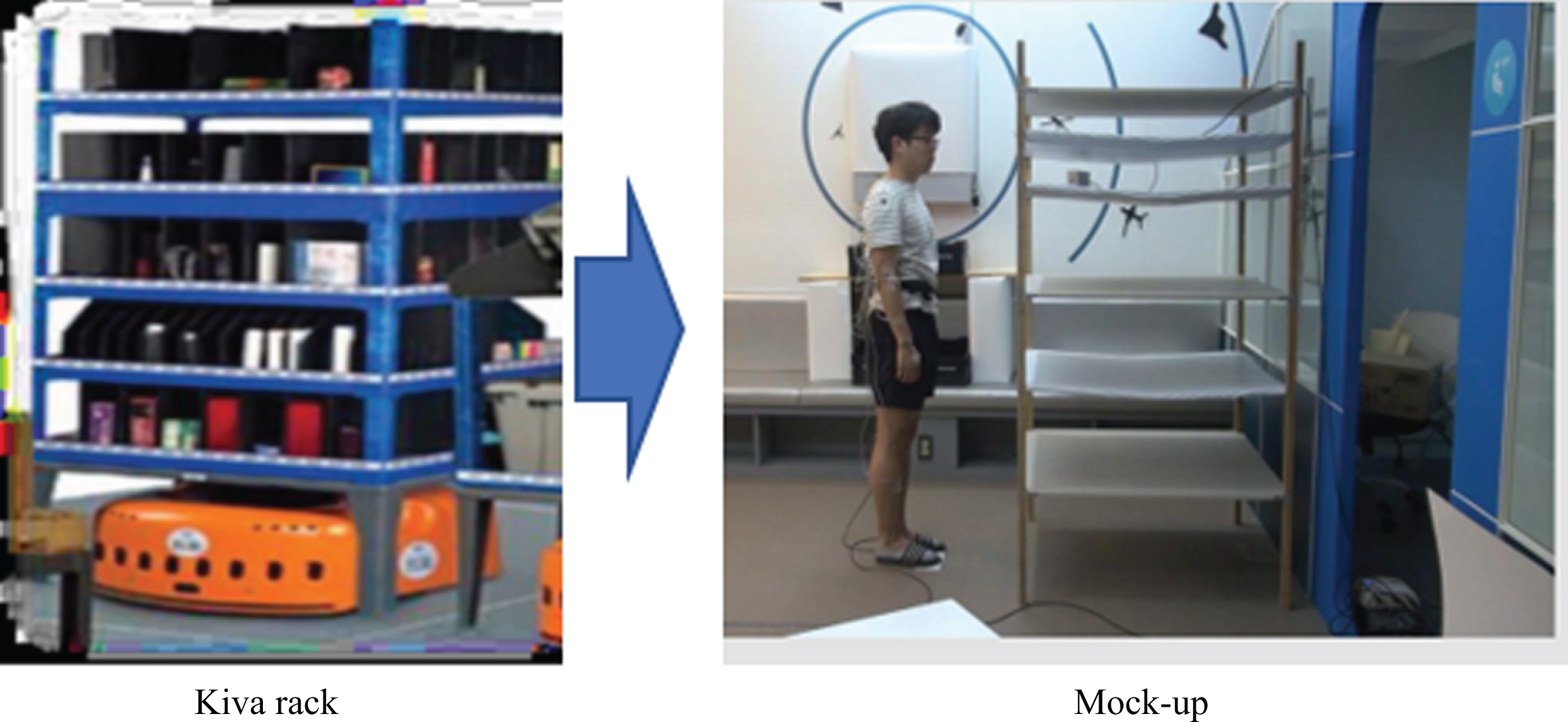
For the purpose of the laboratory study, the mock- up designs of two order picking systems were dev-eloped (see Figs. 9–10). In the moving robot type order picking systems, a mock-up design was built by using the published Kiva system rack size (100×100×195 cm), the same size as that in simulation modeling, and the tote box size was 600×400×240 mm. All study participants were informed of the study purpose and signed a consent form.
Moving robot type order picking system mock-up design.
AS/RS type order picking system picking station mock-up design.
The study protocol was approved by the institutional human subjects review board of the Korea Aerospace University. A total of 20 healthy participants comprised 15 males and 5 females, between 26 and 41 years of age participated in the study. The subjects were not required to use a prescribed working posture, since it was recognized that the preferred postures to complete a given order picking task might vary among individuals. The experiment was carried out by utilizing the same picking order tasks that were performed by subjects using the moving robot type tasks denoted as tasks A, B, and C, as well AS/RS task type denoted as task D.
The laboratory experiment was conducted with an LXM3208-RF system, an eight channel computerized wire EMG measurement system [30]. We selected eight body parts as a result of the simulation. The EMG electrodes were placed on eight muscles selected for the high neck, waist, arm, and legs (for electrode location see Fig. 11). Due to the limited availability of EMG equipment, only the most important muscles of each body region were selected as sEMG measurement points. Each subject performed all experimental tasks A, B, C, and D on a single day with sufficient rest provided between each trial in order to eliminate the potential effects of muscular fatigue. Telescan [31] analysis software was used for EMG data analysis purposes.

EMG electrode attachment locations.
To measure the effect of a given task on total physical activity of all subjects we utilized the root mean square (RMS) value as this index reflects the amplitude of the EMG signal, center frequency, median power frequency, and mean power frequency [32]. As discussed by Cifrek et al. [33], RMS is commonly used to analyze muscle activity by integrating the information of muscular contraction, muscle tone, and muscular exertion frequency. It should be also noted that the RMS index was used in this study since were not interested in differences in the individual muscular activities, but rather in the assessment of the average total physical activity exhibited by all subjects when working on a given order picking task performed when interacting with two warehouse goods-to-picker systems.
Table 5 shows the mean RMS values of muscle activity of all subjects for each of four order picking tasks. ANOVA test was used to determine the differences in the average total physical activity of all subjects exhibited on a given order picking task. In task A, the total average muscular activity of the subjects for the arms and shoulders, involving the trapezius, deltoid, forearm, and thumb, were signifi-cantly higher than the corresponding activities in other tasks. The results for task C showed that total average muscular activity for the back and lo-wer body, as assessed by the multifidus muscle and femoral muscle, respectively, was significantly hig-her greater than that for the other tasks.
Average of muscle activity (EMG) for all subjects under simulated order picking task (total RMS scores)
Average of muscle activity (EMG) for all subjects under simulated order picking task (total RMS scores)
Note: * RMS scores significantly different from other tasks at p = <0.05.
The above findings are consistent with the results of the task simulation, which showed that in task A, the upper part of the shoulder, upper part of the arm, and wrist were overloaded when the product was picked from higher than the shoulder. Task C included a posture in which the legs bend and sit, or the waist has a deep bend, to pick up items at or below knee height. This posture may cause increased postural discomfort in the back and leg muscles. In comparing two different systems, we found that the risk level for musculoskeletal complaints due to postural loading was higher for the moving robot type order picking system than the picking desk.
The order picking tasks carried out by human workers in robot-human co-work order picking systems are easier and simpler than those required in fully manual order picking systems, which include stocking, walking, lifting, carrying, pulling, pushing, picking, and placing. However, human operators must carry out the same tasks repetitively, thus potentially causing overuse of specific muscle groups and leading to musculoskeletal complaints [34].
In this research, we conducted virtual workplace assessment simulations for the most advanced and adapted robot-human co-work order picking systems, with a focus on examining ergonomic factors. We created virtual workplace scenarios for two order picking systems, assessed and compared the systems with a digital human modeling application. As the simulation modeling results showed, the most affected body regions were the trunk, neck, and arms. The AS/RS type order picking system was shown to have lower risk factors for human workers. Moreover, the picking station in moving robot type order picking systems required critical changes with respect to human postures. Given that low-intensity repetitive work has been linked to work-related musculoskeletal complaints [35, 36], job rotation could be considered as a way to reduce risk factors for picking desk workers [37, 38].
This study focused on work design-related risk postural risk factors for human-robot co-work order picking systems with two specific goods-to-picker systems. However, other factors, such as performance and economic considerations that influence warehouse performance, were not considered. Furthermore, the reported assessment and analysis were conducted without considering personal differences of workers such as age, skills, or health status. Thus, further research efforts are needed to produce guidelines and implement effective safety knowledge management principles [39] for improving the working conditions of a diverse employee population in automated warehouse operations.
Conflict of interest
None to report.
Footnotes
Acknowledgments
We would like to express our appreciation to the anonymous reviewers for their insightful comments and helpful suggestions for manuscript revisions. This study was supported by a Korea Agency for Infrastructure Technology Advancement (KAIA) grant funded by the Ministry of Land, Infrastructure, and Transport (grant-18TLRP-C127006-02/ Title: Development of flexible Lego type shuttle and packaging system against operational environment).