
Abstract
This work compares three nonlinear solution methods for the performance of an induction motor’s magnetic equivalent circuit model with magnetic saturation. The interrelation between magnetic flux density and permeability introduces nonlinearities in the differential system of equations. Three popular nonlinear solution methods are selected for comparison, namely (i) the Gauss–Seidel method, (ii) the Newton–Raphson method and (iii) the inverse Broyden’s method. While all three methods have been applied in this context before, no comparison study has been published to the authors’ best knowledge. The study finds that the inverse Broyden’s method is most performant in terms of the number of required iterations, the computation time per iteration and the resulting total computation time. However, for substantial saturation levels, the authors recommend a hybrid implementation of multiple solution methods to obtain robust and reliable convergence.
Keywords
Introduction
Magnetic Equivalent Circuit (MEC) models can generate accurate results in a computationally efficient way when compared to e.g. finite element method (FEM) models or direct-quadrature (DQ) models [1]. In practice, magnetic saturation of the stator or rotor core can easily happen as they are designed to operate at the knee point of their magnetisation curves [2]. Hence, loading the motor above the rated torque or rotor eccentricity can cause saturation. This effect is governed by the nonlinear magnetisation of the material, which decreases material permeability when the magnetic field strength is increased. Because of this, an iterative solution method is required. Most often, the Gauss–Seidel method (GSM), also called the method of successive displacement, is used due to its straightforward implementation and acceptable rate of convergence. Such is the case in the works of e.g. [3] for a MEC of an induction motor [4], for a MEC of a permanent magnet synchronous motor [5], for a quasi 3D MEC of a double-sided permanent magnet synchronous machine and [6] for a hybrid MEC of general electrical machines. Often, the convergence rate benefits from the integration of the derivatives of the governing equations, expressed in a Jacobian matrix. This is the basis for the Newton–Raphson method (NRM), also called Newton’s method, which is used in the works of e.g. [7] for a 3D MEC of an induction motor and [8] for a hardware-in-the-loop MEC of an induction motor. As MEC’s main advantage is computational speed and as magnetic saturation contributes significantly to the total computation time, more advanced nonlinear solution methods should be explored to improve the convergence rate. Broyden’s method is a modification of NRM, which reduces the need to evaluate the exact Jacobian. In the context of MECs of induction motors, this was applied in the work of [9] and mentioned by [10] and [11]. A modified version of Broyden’s method, namely Inverse Broyden’s Method (IBM) is used in this work [12]. This article provides a performance comparison of the aforementioned solution methods for MECs of induction motors with saturation induced by overloading and rotor eccentricity. The emphasis of the analysis is on computational speed, in order to retain the strength of MEC theory even in the presence of saturation.
Nonlinear system modelling
Magnetic equivalent circuit
The nonlinear MEC is based on [13] and includes the effects of slotting, rotor skewing and radial rotor eccentricity. As shown in Fig. 1, the MEC couples the stator and rotor electrical circuits using a magnetic circuit that spans over the stator, air gap and rotor. The magnetic circuits connect to the electrical circuits through electromotive forces (EMFs) induced by magnetic flux changes and through magnetomotive forces (MMFs) induced by currents [3]. The magnetic circuit’s nodes are interconnected by reluctances in the stator and rotor and permeances in the air gap. The coupled behaviour is described
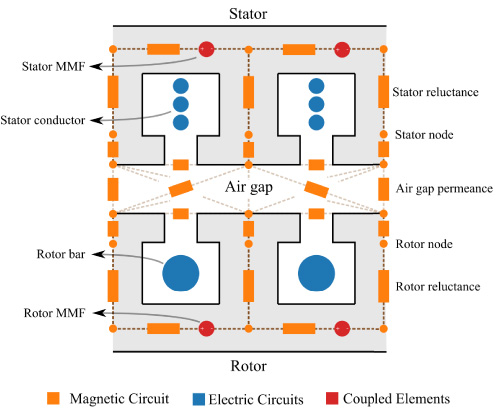
MEC model.
The material-specific BH curve governs the magnetic permeability of the reluctances, where B is the magnetic flux density and H is the magnetic field strength. This material characteristic encompasses two nonlinearities, namely saturation and hysteresis. In this study, only saturation is considered. The used permeability stems from measured data of pure iron [15].
Figure 2 shows the permeability decrease due to saturation, where the material fully saturates around 1.7 T. The measured data was curve-fitted using a tanh function as
The reluctances in
Used solution parameters
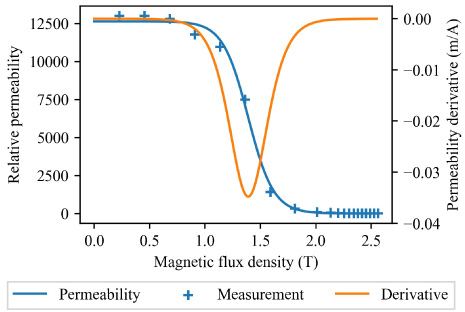
Permeability of pure iron, curve fit and derivative of the permeability with respect to the magnetic flux density.
As discussed in the previous section,
GSM is an iterative method which is used to find the root of
NRM uses knowledge of the derivatives of the SOE to perform a linearisation of the function in the current solution estimate. The root of this linearisation is used for
In Broyden’s method, the Jacobian is replaced by a difference quotient as
Magnetic saturation is examined using overloading and static rotor eccentricity. The simulation ran for 6000 time steps using a time step of 0.1 ms on a 2.6 GHz Intel Core i7-10750H CPU. The MEC configuration is based on a wye-connected, 230 VRMS, 5 hp, 60 Hz motor. The used modelling parameters are given in Table 3. The model’s speed, active power, reactive power, power factor, output power, and power loss are evaluated during steady-state operation and compared with measurements in Table 4. The used nonlinear solution parameters are given in Table 1. The motor was loaded with 8 Nm of torque to induce a moderate global saturation and equipped with a rotor eccentricity of 50% of the air gap length in the positive x-direction, to induce a heavy local saturation. Depending on the figure either the last electrical period was used or the last 6 electrical periods were used to represent steady-state behaviour.
The saturation effects are validated using the magnetic flux density of the stator tooth in the direction of the eccentricity. The results of Fig. 3 agree with the material characteristic of Fig. 2, showing a reduction of the magnetic flux density to 1.74 T as the material’s permeability starts to approach that of free space. The figure also shows how the solutions obtained by the three solution methods are practically equal, as they are constrained by an equal tolerance on the norm of the residuals, see Eq. (11).
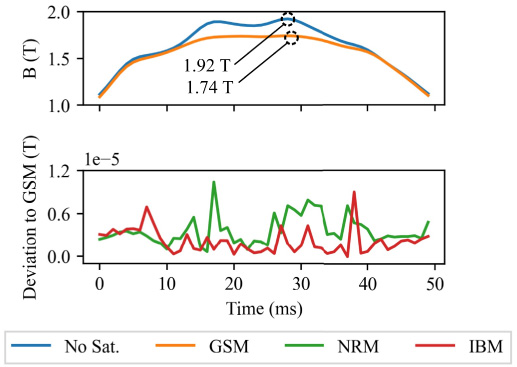
Magnetic flux density of the stator tooth base for h = 1 during last electrical period.
While the solution accuracy is equal, the difference between the methods lies in their performance. Figure 4 shows a considerable difference in the number of iterations over the last electrical period. GSM requires significantly more iterations when compared to NRM or IBM.

Number of iterations per time step for the three nonlinear solution methods during the last electrical period.
Figure 5 collects the required number of iterations for the entire steady state analysis. The observation is made that, on average, GSM requires the most iterations, followed by NRM, followed by IBM. Furthermore, analysing variance is valuable for control applications such as model predictive control where computational predictability is important. Here, the same order of performance is observed, i.e., the variance is largest for GSM, followed by NRM, and then IBM.
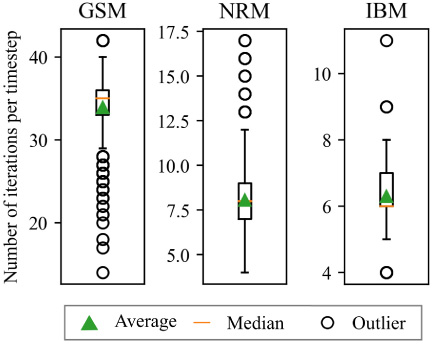
Number of iterations per time step for three nonlinear solution methods using a boxplot visualisation.
A performance comparison is given in Table 2. The results show the computation time per iteration to be the largest for NRM, followed by GSM, followed by IBM, although the differences per iteration are small. A general increase in the computation time per iteration is observed for nonlinear solution methods, which is attributed to the calculation of the norm of the residuals and other overhead. Furthermore, the computation time per iteration seems to be primordially determined by the calculation of inverse matrices and the Jacobian. IBM only explicitly calculates the inverse and the Jacobian once per time step, making it the most efficient solution method. GSM requires the calculation of the inverse of
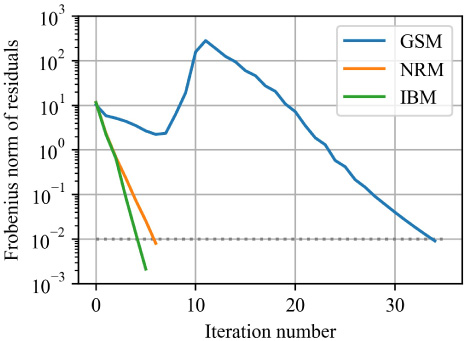
Convergence behaviour for a single time step.
Performance comparison of the nonlinear solution methods
Lastly, Fig. 6 shows slow convergence in GSM caused by the relaxation factor, given by Eq. (9). For relaxation factors close to 0.5, the method becomes unstable and increases the error. Thereafter, as the relaxation factor drops below 0.45, the solution’s accuracy gradually increases again. This sensitivity to the chosen relaxation factor is an additional disadvantage. Further experimentation revealed NRM’s and IBM’s stability to be unaffected by relaxation. The error is generally reduced every iteration until the convergence threshold is reached. This happens consistently with fewer iterations for IBM than for NRM. A possible explanation for this is found in the derivative of the permeability as visualised in Fig. 2. For many magnetic flux density values, the derivative of the permeability is approximately zero. This results in an overshoot of NRM and is a known difficulty of the method in general. As IBM approximates NRM over two iterations, it is more likely to avoid a derivative of the permeability which is close to zero. Therefore, this method is less likely to overshoot the root and thus, on average, converges in fewer iterations.
Lastly, it is important to note that as saturation gets more severe, GSM is able to solve the system for the largest saturation levels, followed by NRM, and IBM. Therefore, for applications which require robust MEC simulations, multiple methods should be applied in a hybrid manner: e.g. IBM can be used by default, with a threshold on the number of iterations. If this threshold is exceeded, GSM can be invoked until it is able to solve the system in fewer iterations than a second threshold, whereafter the solution strategy reverts to IBM. A more extensive analysis of the convergence limitations is a topic for further research.
Induction motor model parameters [3]
Model rotor speed and power comparison with reference to measurements [3]
A MEC model of an induction motor is constructed, with saturation induced by overloading and rotor eccentricity. The nonlinearities, introduced by the magnetic flux-dependent reluctances in the stator and rotor, are elaborated. Three nonlinear solution methods are proposed for the comparison, namely: (i) the Gauss–Seidel method (GSM), (ii) the Newton–Raphson method (NRM) and (iii) inverse Broyden’s method (IBM). Of these methods, the first two have been explored extensively in literature. Solution accuracy is validated using the stator tooth magnetic flux density. Furthermore, a performance comparison revealed IBM to be the most performant solution method in terms of (i) the required number of iterations, (ii) the computation time per iteration and resultingly (iii) the total computation time. Compared to NRM, this is explained by the derivative of the permeability often being close to zero, which is a known weakness of NRM. Compared to GSM, this is explained by its sensitivity to the relaxation factor and its neglection of the system’s derivatives. However, for substantial saturation levels, the observation is made that GSM converges most, followed by NRM, and IBM. Therefore, the authors advise a hybrid implementation of multiple solution methods to obtain a flexible, efficient and robust solver. Future research should continue investigating the influences and limitations of the methods’ convergence.
Footnotes
Acknowledgements
This work was supported by the Research Foundation - Flanders (FWO) - application number 1S02523N and the TU Darmstadt research visit by CREATOR (DFG CRC TRR 361).