
Abstract
In order to solve the problems of high control error, large maximum output torque and long control time in the traditional full speed range sensorless control method of high-speed permanent magnet synchronous motor, a full speed range sensorless control method of high-speed permanent magnet synchronous motor based on neural network is proposed in this paper. Analyze the range of stator current trajectory in rotor coordinate system, so as to build the discrete model of permanent magnet synchronous motor, and build the whole process control model of high-speed permanent magnet synchronous motor by using neural network algorithm. Through the design of observer, overall control structure and speed regulation range of non inductance control, the goal of non inductance control in the full speed range of high-speed permanent magnet synchronous motor is achieved. The experimental results show that the non inductive control error in the full speed range of the high-speed permanent magnet synchronous motor is 0.2, the maximum output torque is 420 N
Keywords
Introduction
After entering the 21st century, the actual total demand for energy is increasing. The energy problem has become a key to economic and social development at this stage. From the production to use of electric energy, the motor plays a very key role, so it also makes the electric energy consumption large. With the maturity of rare earth permanent magnet material technology and manufacturing technology, the variable frequency speed regulation system of permanent magnet synchronous motor has become the focus of many scholars. Compared with asynchronous motor, the rotor uses permanent magnet to generate air gap flux without external excitation. Therefore, it has the advantages of energy saving and high efficiency, high power density, simple structure and fast dynamic response. It is widely used in fan, pump, electric vehicle and other fields. Therefore, vigorously developing high-performance permanent magnet synchronous motor variable voltage and variable frequency inverter drive technology is of great significance for energy conservation and emission reduction and ensuring energy security. Permanent magnet synchronous motor (PMSM) provides excitation by means of permanent magnets, has a simpler structure, and its efficiency, power factor and power density are greatly increased by the absence of excitation losses [1]. Since there is no collector ring and brush structure, the loss and failure rate are reduced [2]. Because of these advantages, high-speed PMSM has attracted attention. This low-carbon motor has been widely used in robots, aerospace and other high-performance control fields [3, 4, 5]. Therefore, the control performance of motor drive equipment needs to be continuously improved. At present, the relevant scholars have conducted research.
In order to improve the drive and control performance of PMSM, Wei et al. [6] use the speed open-loop control method and optimize the switching process to reduce the impact during switching. The simulation model verifies the correctness of the optimized program and algorithm, and compares the motor current and speed waveforms of the two switching modes. Usama et al. [7] present a control method for a built-in PMSM. Huang et al. [8] present an integrated control architecture that allows for speed and reference position inputs.
Neural network has the advantages of strong approximation to nonlinear functions, strong adaptability, and strong generalization of algorithms. It has unique advantages in solving nonlinear and uncertain systems. Neural network has been extensively applied in PMSM servo control system, especially in PMSM model identification and parameter identification, high performance position/velocity trajectory tracking control and harmonic suppression. The inductionless vector control of high-speed PMSM in full speed range mainly includes three stages: start-up stage, low speed operation stage and medium speed operation stage. The control system adopts different control methods in different stages, so it is necessary to consider the problem of switching between different control methods. In this work, a neural network-based inductionless control method of high-speed PMSM is proposed.
Establishment of control model of high-speed PMSM
Regional distribution range of constructing current track
The voltage equation of AC PMSM under steady state in rotor coordinate system is shown as Eq. (1).
In the formula:
It can be seen that the steady state voltage loss of the motor is mainly composed of three parts: winding resistance voltage, coupling voltage and BEMF voltage. The coupling voltage and BEMF voltage are proportional to the speed of the motor. The proportion of the steady state voltage loss is much higher than that of the stator winding voltage under high speed operation. Therefore, the stator voltage equation of the motor can be rewritten as shown in Eq. (2).
For the convenience of discussion, the stator steady-state voltages are as follows:
Since the DC side voltage of the inverter is constant [10], the steady state voltage of the stator in Eq. (3) must be less than the maximum voltage that the inverter can provide, the following may be obtained:
Type,
Can be seen from the Eq. (5), reasonable planning of the current track can effectively increase the motor speed range.
In addition to the stator voltage limit, the stator current
Type (6) is called the current limit circle. If the motor is running at a certain speed, the stator cross-axis current and direct axis current must be within the intersection range of the voltage limit circle and the current limit circle [11].
The above is the analysis of the stator current
When the motor runs steadily at a certain speed, the electromagnetic torque
In the control of AC PMSM, the maximum torque output, namely
The following is the derivation of the MTPA curve in motor control. When the motor is running on the MTPA curve, it has:
With
Type (10) is the MTPA curve track equation of the motor in the rotor coordinate system. However, it should be noted that Type 10 is only suitable for salient pole AC PMSM. When the motor is stealth pole motor, the cross-axis inductance is the same as the direct axis inductance, that is
Stator current vector trajectory.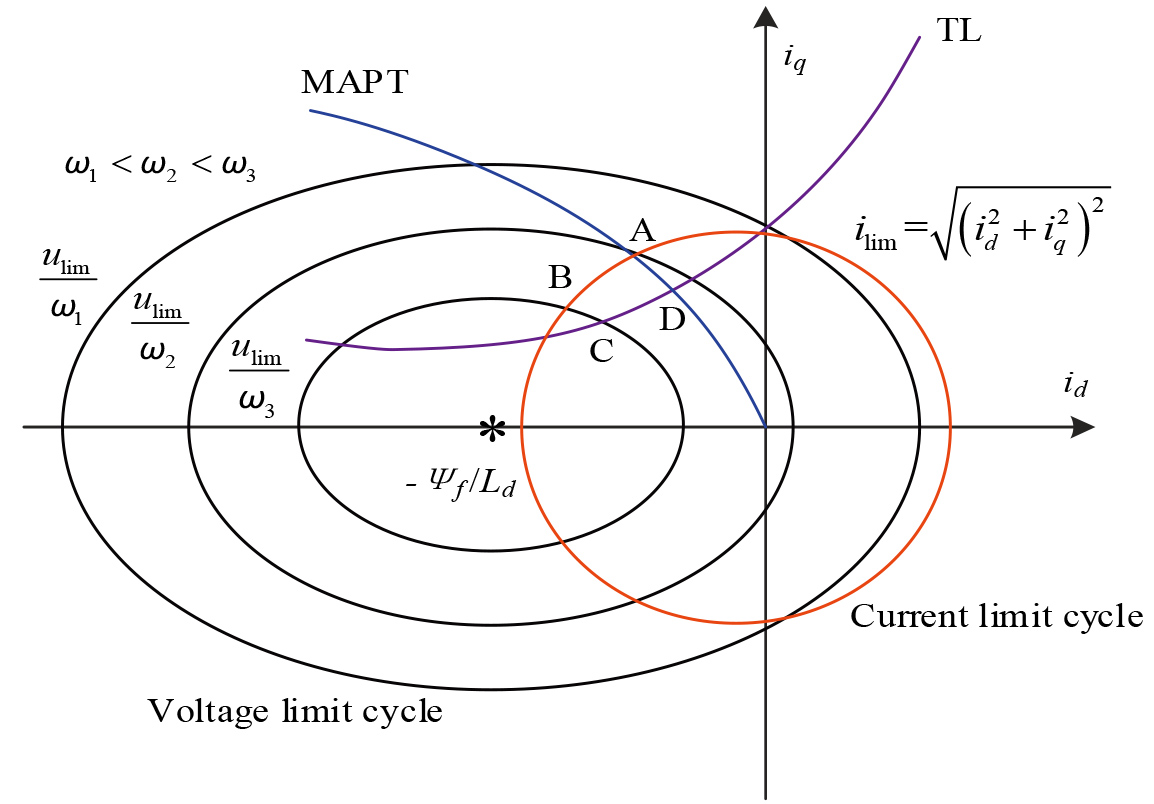
Below by Fig. 1 on the motor control process current track analysis. When the motor instruction speed is
As can be seen from Fig. 1, there is a current trajectory CE which enables the motor to run stably at
The mathematical model of the PMSM under the two-phase rotating coordinate system (i.e. the DQ coordinate system) is as follows:
Discretization of the expression Eq. (11) by the forward difference method [14], using the first order forward difference in place of the first derivative:
Define step size
Putting Type 13 into the motor model Eq. (11), a discretization model of the PMSM can be obtained. For the convenience of research, the discrete model of PMSM is divided into two parts: electrical state space model and mechanical state space model.
The electrical state space model is:
Among them:
The electromagnetic torque
The discrete model of permanent magnet synchronous machine is:
Of which:
The controller can apply a set of finite-set
In intelligent control, neural network has made considerable progress. The RBF neural network has a three-layer structure [15]. For each sample that needs to be trained, there is less weight to be corrected, so it will have a faster training speed, stronger nonlinear mapping ability, faster convergence speed, higher approximation precision, and stronger generalization ability.
In this work, a control method of sensorless PMSM based on RBF neural network observer is proposed.
Structure design of observer
This observer is used in the electrical and mechanical systems of the PMSM, and its structure is shown in Fig. 2. Through the integral function of the observer, the controller can realize the compensation of system disturbance, and also can restrain the influence of measurement noise, improve the current and torque quality of the motor, and the compensation speed can be adjusted through parameters
Schematic diagram of observer structure.
In SPMSM, because of
Among them,
The mechanical equation of motion of the motor is:
Theta represents the rotor position, J represents the moment of inertia, T represents the motor torque, F represents the nonlinear friction, and
Vector control is also an indirect control, it is to control the motor current as the intermediate link in the control, and then by adjusting the motor current to change the motor torque, the ultimate realization of motor torque control [16]. In the rotor field-oriented vector control strategy of PMSM
From the Eq. (20), the motor torque T is linear with the current
The Park inverse transformation matrix is:
The voltage equation of PMSM in the two-phase stationary coordinate system is obtained by Park inverse transformation.
Among them,
And the BEMF
Figure 3 shows the vector control system block diagram of sensorless PMSM. The PI regulator is used as speed controller.
Vector control system of sensorless PMSM.
The biggest characteristic of BP neural network is its error back-propagation process, that is, from the output layer, the output error of each layer of the neural network is calculated in turn, and then the relevant parameters of each layer are adjusted according to the error adjustment algorithm selected, so that the output of the neural network can approach the expected value.
Firstly, the error criterion function of neural network is defined. In this paper, the quadratic error function is used. For any sample p, the error is shown in Eq. (24).
In the formula T and 0 respectively represent the expected output and actual output of BP neural network for P training samples of the system. The formula for calculating the global error is shown in Eq. (25).
Neural network learning algorithm using gradient descent method, in order to minimize the target index function, according to the negative gradient direction of the error function modified weights [17]. First, the output error of each layer is calculated from the output layer, and then the weights and thresholds of each layer are adjusted according to the Eq. (26).
According to the Eq. (26), the modifications of the weights of the output layer, the thresholds of the output layer, the weights of the hidden layer and the thresholds of the hidden layer can be calculated, respectively.
According to the Eq. (27), the modifications of the weights of the output layer, the thresholds of the output layer, the weights of the hidden layer and the thresholds of the hidden layer can be calculated respectively, as shown in the Eq. (28).
And:
To improve the learning speed of BP neural network, the momentum item
In the formula,
The adaptive rate model is:
Therefore, the neural network-based control of high-speed PMSM is completed.
Aiming at the PMSM model predictive direct speed control algorithm, this paper carries out simulation experiment on MATLAB/Simulink platform. The model predictive direct speed controller is written with S function provided by Simulink. The controller directly outputs the control signal of the inverter to drive the inverter. The PMSM module provided for Simulink by the PMSM.
Simulation parameters
Simulation parameters
Taking the operating parameters of high-speed permanent magnet synchronous motor as the experimental sample data, the experimental sample data are denoised and normalized to ensure that the data length is lower than the maximum data length that the simulation software can run. The preprocessed data is used as the experimental sample data. During the experiment, in order to improve the authenticity and scientificity of the simulation results, the simulation parameters need to be set. It mainly inputs part of the experimental data into the simulation software, obtains the optimal operation parameters of the software in the process of multiple operations, and takes them as the initial simulation parameters, so as to improve the reliability and stability of the simulation experiment.
The Reference [7] method, Reference [8] method and method of this paper are taken as experimental comparison methods, and the full speed sensorless control error, maximum output torque and control time of high-speed permanent magnet synchronous motor are taken as experimental indexes to verify the application effects of different methods.
Through the iterative method, the
Accuracy results.
As can be seen from Fig. 4, with the extension of test time, the error of sensorless control in the full speed range of the method of this paper is stable, and tends to be stable when the number of iterations reaches 400, that is, the control error is 0.2. The control error of Reference [7] method is 0.7 and that of Reference [8] method is 0.6. Compared with the experimental comparison method, the control error in this paper is lower and the accuracy is higher. This is because this paper selects the quadratic error function, which can improve the effect of control error adjustment, ensure that the output of neural network is close to the control expectation and improve the control accuracy.
The torque ripple of the method of this paper, Reference [7] method and Reference [8] method is measured at a given speed of 2000 r/min at a time of 60 s, and the results are shown in Fig. 5.
Torque ripple results.
According to Fig. 5, the method of this paper can effectively suppress harmonic and reduce torque ripple by modifying the parameters of the neural network using gradient descent method. Therefore, at 2000 r/min speed, the maximum output torque of this method is kept at 420 N
When the torque is 550 N
Results of speed response.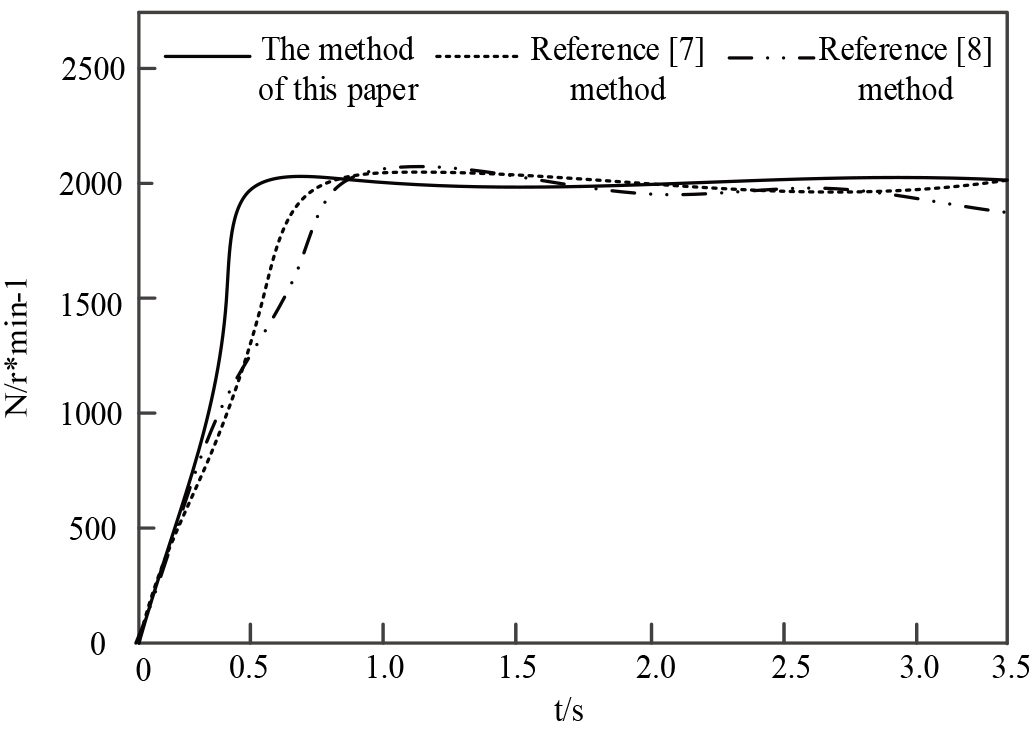
According to Fig. 6, the response curve of the method of this paper is faster, reaching 2000 r/min at 0.6 s, while the Reference [7] method and Reference [8] method reach a given value after 0.9 s and 0.8 s. This is because the method using PI regulator as speed controller can effectively obtain the rotor position and speed signal, so it can improve the speed response effect.
In this work, a neural network-based control method of full speed PMSM without inductance is proposed. The current trajectory is defined, the discrete model of PMSM is constructed, and the full speed range control model of PMSM established based on weak magnetic field control. RBF neural network is used to control and adjust the speed range of high-speed PMSM without inductance, so as to achieve accurate control. The simulation results show that this method has the characteristics of low control error, low torque ripple and short control time. It can improve the performance of high-speed permanent magnet synchronous motor, and has an important contribution to the field of full speed sensorless control of high-speed permanent magnet synchronous motor based on neural network. Because there are few indicators verified in the experimental process, it is necessary to verify the application effect of this method with more data and indicators in the future, so as to continuously improve the method, so as to further improve the full speed sensorless control effect of high-speed permanent magnet synchronous motor based on neural network.