
Abstract
A novel Non-Linear Fractional order PID controller (NLF-PID) is designed for control of coupled and non-linear 2-link rigid robot. The structure of proposed controller comprises of non-linear hyperbolic function of instantaneous error and current state cascaded with Fractional Order PID (FO-PID). Non-linear function provides adaptive control ability while incorporation of fractional operator enhances flexibility of designed controller. To examine the comparative merits of NLF-PID controller, Non-linear PID (NL-PID), FO-PID and traditional PID schemes are also implemented. Design variables of controllers are optimally tuned using multi objective Non-dominated Sorting Genetic Algorithm II (NSGA-II) for small variation in control and error signal. Results prove that NLF-PID provides robust and efficient control of robotic arm as compared to other designed controllers for reference tracking, model uncertainty, disturbance and noise due to inherent shortcoming of sensor.
Keywords
Introduction
The conventional parallel structure PID is composed of error, integral of error and derivative of error having constant or linearly varying gains. Such controller performs well for systems under normal operating conditions but the performance degrades with changes in operating environment and presence of uncertainties. Several researchers and engineers illustrate that an efficient control is achieved when the three gains are fabricated as non-linear function [1–3]. Literature presents different methods to design non-linear PID controller. Kelly & Carelli [2] designed a PD controller with gains varied nonlinearly as a function of states. Results prove that the proposed controller outperforms the traditional PD controller for two-link manipulator. Su et al. [3] designed a non-linear PID controller for 2 link robot, which is found superior in comparison to PID controller. Seraji [4] discussed design methodology for nonlinear systems where fixed gain PI/PD/PID controller is cascaded with a non-linear function of system error. The robustness and efficiency of proposed controller was examined on linear approximated model of robot. Shang et al. [5] also discussed non-linear proportional derivative control technique for two degree of freedom parallel robot. The enhanced performance obtained for trajectory tracking verifies the usefulness of proposed scheme over fixed gain PD controller.
The fractional calculus is one of the attractive approaches [6] to further enhance the capability of traditional PID controller, because limitless memory is offered by fractional order operators. This advantage encourages for designing fractional order PID (FO-PID) controller, in which the order of integration and differentiation is not restricted to integer. Numerous applications of FO-PID controller are reported in literature [7–22]. Zamani et al. [20] designed multi-objective CSA tuned FO-PID controller for control of base isolated building and its performance is compared with previously designed controllers. Results obtained prove robust performance of the controller over other techniques. Li et al. [21] presented Cauchy and Gaussian mutation based GSA tuned fractional order PID controller for pumped storage unit. The designed controller possesses extra capability to achieve better control performance as compared to PID scheme optimized with other algorithms. Khubalkar et al. [22] investigated comparative study of discrete FO-PID and conventional PID controller for speed control of buck convertor fed DC motor. The parameters are tuned using PSO algorithm to achieve optimal design performance of the controllers. Results claim the superior performance of FO-PID in comparison to PID controller in all aspects.
It is revealed from the literature that FOPID controller performs better and is more robust than the conventional PID control technique. The introduction of fractional order to PID controller adds two extra design parameters and thus provides additional degree of freedom to control structure at the cost of complexity. Although tuning of increased number of variables is a challenging issue, selection of parameters by a suitable optimizing algorithm provides the solution. Numerous meta-heuristic and evolutionary optimization approaches have been examined over time, for optimal tuning of parameters [19, 23–32]. A single objective optimization method provides best results for one objective whereas multi objective optimization approach tries to obtain equilibrium between multiple objectives and provides several optimal solutions. But generally objectives are conflicting and a suitable trade-off is required between these objectives. This motivates to utilize evolutionary optimization methodology, non-dominated sorting genetic algorithm-II [26] for obtaining optimal controller parameters.
In this paper, a novel Non-linear Fractional order PID (NLF-PID) controller is proposed by introducing nonlinear gains along with fractional order operators to a linear fixed-gain PID controller. The proposed controller is an innovation to attain robustness against measurement noise and consistent response even under varying unfavorable conditions, which is not achieved by conventional PID controller. The control configuration of NLF-PID is procured from a fractional order controller by varying its gains nonlinearly as function of error and state of system. NLF-PID controller generates large gain when instantaneous error and states are high, so as to acquire fast response and considerably low gain when error and states are low to prevent oscillations in the output. So, the proposed controller is capable of taking appropriate control action for instantaneous error and is also robust to variation in current state of system. NLF-PID finds its application for broad class of non-linear systems, especially for systems subjected to enormous noise and disturbance with parametric uncertainty. The potential of proposed NLF-PID controller is examined for control of a two link robotic manipulator. A complex nonlinear model of robotic manipulator with coupled dynamic states is considered for the present work. PID, FO-PID & NL-PID control structures are also implemented for comparative study, and controller parameters are optimally tuned by NSGA-II. The efficacy of the designed controllers is analyzed for tracking, uncertainty in system dynamics, disturbance and noise rejection.
The paper is structured as follows: Section 2 presents the description of robotic arm, followed by the design of controllers explained in Section 3. Section 4 presents the detailed analysis of simulation results. Lastly Section 5, summarizes the conclusion and future scope of the research.
Description of robotic arm
The robotic manipulator finds application in many important industries such as medical science, chemical industry, atomic power generation, space application etc. The mechanical model of two-link robotic arm under consideration is shown in Fig. 1. It consists of rigid links connected via revolute joints, point mass located at distal ends of each link, actuators and encoders. The dynamics of two link robot is described by nonlinear and coupled differential equation [33] as
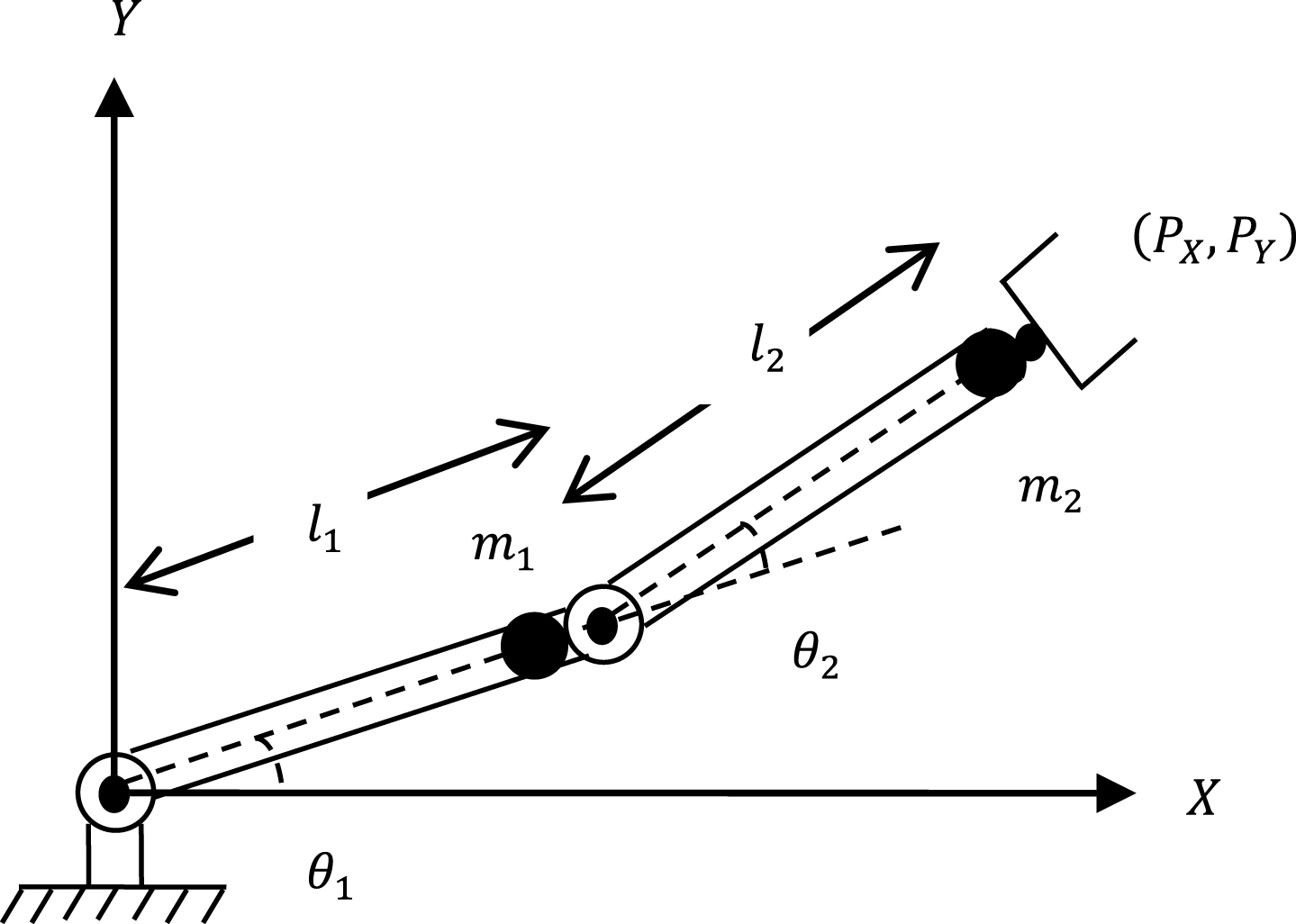
Structure of two link robot.
θ
i
,
Design parameters of robot
Introduction of non-linearity to traditional controller
The traditional PID controller in time domain is described as
Over the last decade, fractional calculus has emerged as an innovative tool which is being utilized in the fields of image processing, biomedical signal processing, control design etc. Fractional calculus is the non-integer order extension of ‘integrator’ and ‘differentiator’. These non-integer operators are extensively utilized for control and modeling of system by researchers across the globe and its various applications are seen in literature [6–22]. Numerous approaches are reported in literature to implement fundamental fractional operator [34–36]. In this work, fractional order integration and differentiation in continuous domain is designed by well-known approximation presented by Oustaloup. It is designed by considering a recursive filter of order 2K
ou
+ 1, which is concisely expressed as [25] follows
The performance of non-linear and time varying system deteriorates due to sudden changes in operating conditions. Therefore to achieve accurate and precise performance of system under such situations, the gains of controller must be adjusted online [1]. Incorporation of nonlinear function with linear controller realizes the aforesaid task which cannot be achieved by fixed gain linear scheme alone. The proposed NLF-PID scheme is designed by cascading the hyperbolic nonlinearity with fixed gain FO-PID controller. Hyperbolic function of instantaneous error and state adjusts the gain of controller online, thereby providing self-tuning ability to control scheme. The mathematical expression for control action of NLF-PID is given as
Where, constant α i describes the change in non-linear function y i , which is constrained to y min ≤ y i ≤ y max . The lower bound of non-linear gain is y min = 2, when e + θ = 0 and the upper bound is y max = 2cosh (α (e + θ)). Variation of non-linear gain y i is shown in Fig. 2, for the range of error as -0.15 ≤ e ≤ 0.15, position of link as -4 ≤ θ ≤ 4 and α = 0.5, then maximum value of y i obtained is 8.0901. It can be noted from Fig. 2 that, non-linear gain y i attains higher value when the sum of instantaneous error and current state is high, which in-turn generates large corrective signal that forces the system response to track reference at a faster pace. Whereas a considerably lower value of non-linear gain is attained, when the sum of current state and instantaneous error reduces, thereby avoiding oscillations and overshoots in system response. Thus, incorporating non-linear function of state and error not only takes appropriate control action for error but also provides adaptability for change in system state.

Variation of non-linear function ‘y i ’ with e and θ.
A dedicated controller controls the position of each link. The closed loop control structure of NLF-PID for robotic manipulator is shown in Fig. 3. NL-PID is also implemented for control and is designed by considering the order of fractional operator ‘λ i = 1’ and ‘μ i = 1’ in NLF-PID scheme. The designed non-linear control schemes are also compared with linear FO-PID and PID controller in servo and regulatory mode. The structure of FO-PID is obtained by replacing the non-linear function ‘y i = 1’ in NLF-PID, whereas PID controller is obtained by considering the order of non-integer operator ‘λ i ’ and ‘μ i ’ as 1.

Closed loop control structure of NLF-PID for two link robot.
Tuning of a controller is the key aspect in designing an efficient control scheme. Although traditional tuning methods such as Ziegler-Nichols, Damped oscillation, Continuous Cycling etc. are capable of providing satisfactory results, however superior performance is achieved if parameters are optimized by a nature inspired algorithm. As the system needs precise tracking with minimum variation in control effort, there is requirement of an optimization technique with multi-objective approach. A single objective algorithm provides best solution for individual objective, thereby making others to compromise. Another existing method is optimizing the weighted sum of different objectives, which leads to a single optimum solution. The problem in this method is that it does not generate alternative solutions to trade-off different objectives according to the preferences of designer. Hence multi-objective (MO) optimization comes in picture as it generates a group of good solutions with trade-off amongst different objectives and allows the designer to select appropriate solution. In this work, accurate and tight position control of links is required at minimum cost of control signal, thus objective function considered are (a) Sum of absolute errors (b) Sum of variation in torques. Mathematical formulation of considered objectives is given as follows
These objective functions are contradictory and at odds with one another i.e. minimization of objective z1 will increase z2 and vice versa. The optimum design of controller is accomplished through MO NSGA-II technique for minimization of both cost functions simultaneously. NSGA-II is biologically inspired MO approach, which exploits Pareto based technique. It’s simple and effective non dominant positioning approach has made it quite popular among scientific community for solving wide range of MO issues. Literature also reveals that it offers superior sorting ability and elitism in comparison to NSGA-I algorithm [16, 32]. The outline for design of NSGA-II algorithm is as follows Generate the initial parent population ‘P’ from specified range of design variables. Determine the value of objective for each individual and arrange population on the basis of non-domination. Assign every solution with a rank corresponding to its non-domination level. Apply the general binary tournament selection technique. Produce child population of same size ‘P’ by utilizing Simulated Binary Crossover and polynomial mutation. Combine the parent and child population to generate population of size ‘2P’. Sort generated population according to non-domination. Fill best entities from the sorted fronts to form new population ‘P’. Apply crowding distance technique, if the next generation is filled partially by a front. This technique assures diversity in population and avoids local convergence. Repeat the sequence (ii) to (ix) until terminating condition is attained.
Comprehensive simulations are performed to examine the performance of NLF-PID and other designed controllers for reference tracking, uncertain dynamics, disturbance and noise rejection. All simulation studies are carried out on MATLAB platform in Intel® i5 processor and 8 GB RAM personal computer. Design variables of all the controllers are optimally tuned for minimum variation in control and error objectives by using NSGA-II. The associated parameters of NSGA-II for optimal tuning of controllers are listed in Table 2. Sampling time is taken as 1 ms and ODE solver utilized for simulation is 4th order Runge-Kutta. The control signal generated from controller is limited to the range [- 5, 5] Nm and fractional order operator is implemented using 5th order recursive filter with frequency being bounded to [0.001, 1000] rad/s. A time dependent cubic polynomial is considered as reference signal [32] which is described as
Subject to
Methods and Parameters of NSGA-II for optimization of controller
The boundary conditions for the above Equation (16–18) are taken from [32]. Optimum parameters of controllers are searched in range [0, 1] for α i , λ i and μ i ; [0, 50] for K I i and K D i ; and [0, 300] for K P i . Pareto front obtained by NSGA-II for each controller is shown in Fig. 4. It is noted from figure that most feasible and optimum solution for z1 and z2 is obtained by MO optimization technique. The objective function values obtained for NLF-PID are z1 = 6.43 and z2 = 13.06, which are lowest as compared to other controllers. Further performance of designed controllers may be evaluated on the basis of measures such as Integral Absolute Error (IAE), Integral Square Error (ISE), and Integral Time Square Error (ITSE) etc. In this work, Integral Absolute Error (IAE) is preferred over other indices as deviation in error is small (<1) for both links. Therefore, squaring of such small errors would reduce its contribution for ISE, ITSE etc. Corresponding parameters, IAE and objective values of designed controllers are recorded in Table 3. These parameters of the controllers remain unaltered for all case studies.

Pareto front between objective z1 and z2 (a) NLF-PID, (b) NL-PID, (c) FO-PID and (d) PID with red point is optimal solution.
Optimal parameter, IAE and objective function value for NLF-PID, NL-PID, FO-PID and PID
The reference tracking response of NLF-PID, NL-PID, FO-PID and PID controller for both links is depicted in Fig. 5(a) and corresponding control torques are found within range of [–5, 5] Nm as shown in Fig. 5(b). The tracking error is depicted in Fig. 5(c), from which it is clear that error is reduced significantly by use of non-integer operator and inclusion of nonlinearity to traditional PID controller. This is because non-integer operator increases the degree of freedom of controller and introduction of nonlinearity embeds the self-tuning capability in proposed NLF-PID. Quantitative analysis of the performance of NLF-PID and other controllers is done on the basis of Integral absolute Error (IAE), which is recorded in Table 3. Least IAE values are obtained for NLF-PID as compared to other designed controllers, thus making it most efficient controller. Moreover Fig. 5(d) shows the X and Y-coordinates of end effector with respect to time. Further potential of the proposed and other controllers are analyzed by conducting intensive simulation studies for parameter uncertainty, sensor noise and actuator disturbance.
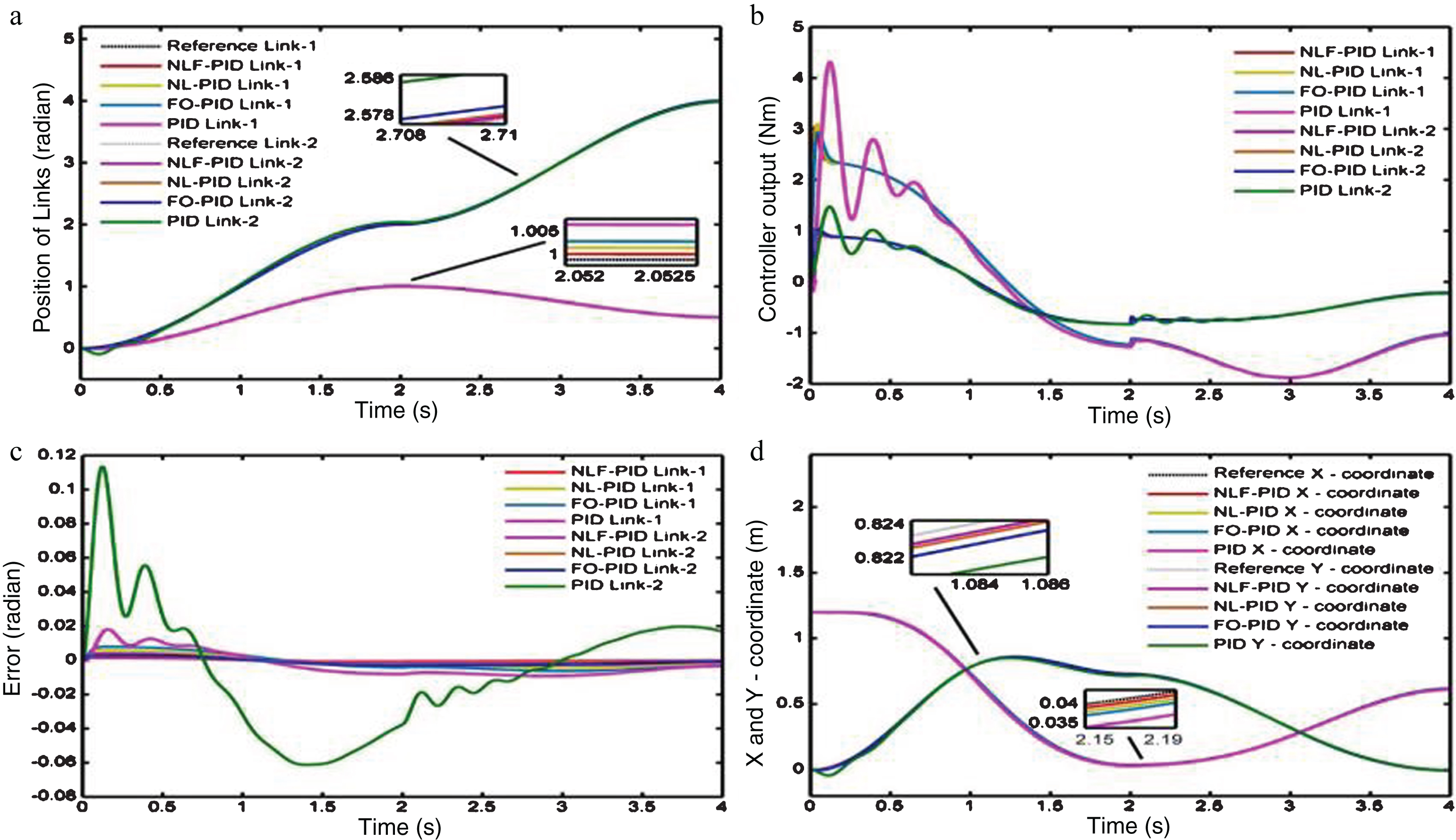
Trajectory tracking performance (a) Reference tracking, (b) Control signal, (c) Position error and (d) X and Y-coordinates of end effector for NLF-PID, NL-PID, FO-PID and PID.
Robustness is the ability of controller to adapt the changes arising in the system due uncertainties, disturbance and noise. In this regard a comparative study is performed to test robustness of the controllers.
Model parameter uncertainties
Most of the real world systems are highly complex and poorly understood which makes the determination of their mathematical model quiet a tedious task. Such systems always have uncertainties and their parameters may vary with time. Handling of such uncertainties and parameter variations becomes a necessary issue for any controller. Therefore the capability of NLF-PID and other controllers is examined for uncertainty in the model of two link robotic manipulator. The uncertainties are incorporated in the model as ±10% change in parameter values, namely mass, length and both mass as well as length of link-1 and link-2 from their nominal values. The model with uncertain parameters is controlled using the designed controllers and IAE is evaluated and recorded in Table 4 for various cases. For the controller to be robust, the value of IAE should remain constant and smaller for all instances of parameter uncertainty. It is observed from Table 4 that IAE of links for NLF-PID controller remains almost unchanged and small in contrast to other controllers for all instances of parametric uncertainty.
IAE for NLF-PID and other controller for 10% (a) increase and (b) decrease in parameter values
IAE for NLF-PID and other controller for 10% (a) increase and (b) decrease in parameter values
In real world systems, there might be unexpected disturbances which unfavorably influence the response of system. A proficient controller should have ability to discard the effect of disturbances such that output of system does not diverge from reference signal. Therefore disturbance dismissal plays a key role in testing the robustness of controllers. Sinusoidal disturbances of different amplitudes (mentioned in Table 5) are added to the inputs of robotic manipulator for complete time span to investigate the robustness of NLF-PID and other designed controllers. IAE for link-1 and link-2 under the influence of disturbances for controllers are summarized in Table 5. The tracking performance, control signal, position errors and X and Y-coordinates of end effector of designed controllers for the case of 0.6sin20t Nm disturbance are shown in Fig. 6. The variation in IAE of link-1 and link-2 are compared for various disturbances introduced to the inputs of robotic manipulator and are shown in Fig. 7. It is revealed from the results that variations in IAE values are smaller for link-1 and link-2 for NLF-PID controller as compared to other designed controllers for different cases of disturbances. Hence, the proposed controller performs better than the other controllers in presence of disturbances.
IAE variation of NLF-PID, NL-PID, FO-PID and PID controllers for added sinusoidal disturbances
IAE variation of NLF-PID, NL-PID, FO-PID and PID controllers for added sinusoidal disturbances
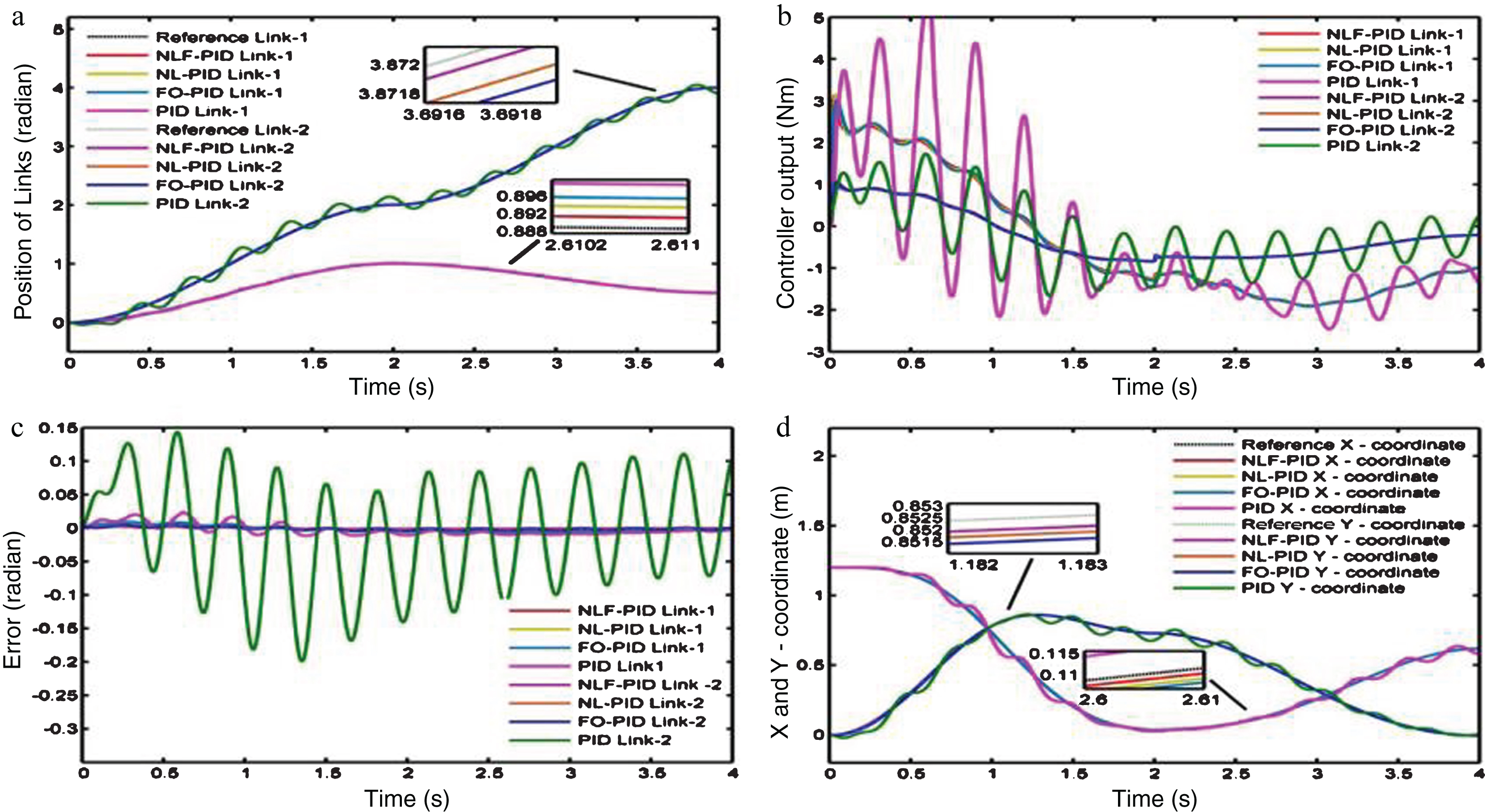
Performance comparison (a) Trajectory tracking, (b) Control signal, (c) Position errors and (d) X and Y-coordinates of end effector for NLF-PID, NL-PID, FO-PID and PID controllers for the addition of 0.6sin20t Nm disturbance.

Variation in IAE (a) Link-1 (b) Link-2 for designed controllers.
All the real world systems are generally affected by random noise generated within the sensors, which deteriorate its output. An efficient controller must be capable enough to suppress the effect of noise generated in the system. Thus suppression of noise is an important issue for any controller. In this section, the effect of random noise on the performance of various designed controllers is analyzed. A random noise with maximum amplitude of 0.005 rad is added in the feedback path of the system to link-1, link-2 and then to both the links simultaneously as shown in Fig. 8(e). The simulation results for NLF-PID, NL-PID, FO-PID and PID controller under the influence of random noise on both links are depicted in Fig. 8. The value of IAE for each controller after the addition of random noise is given in Table 6 and its quantitative analysis is shown in Fig. 9. It is implied from the bar graph that IAE for NLF-PID is lesser as compared to other controller for all cases. Hence, it is concluded that the proposed control scheme is the best among all the designed controllers in terms of noise suppression capability.

Performance comparison (a) Tracking performance, (b) Control signal, (c) position errors and (d) X and Y-coordinates of end effector (e) Added noise profile for NLF-PID, NL-PID, FO-PID and PID controllers.
IAE Variation for random noise

IAE variations for (a) Link-1 and (b) Link-2 for NLF-PID, NL-PID, FO-PID and PID controllers for adding noise to link-1, link-2 and both links.
Further considering all the aspects discussed above, it is evident that NLF-PID controller is highly efficient and robust controller than the other designed schemes.
In this work, design of a novel NLF-PID for control of a two link rigid manipulator is presented. The structure of controller is developed by cascading a hyperbolic function of instantaneous state and current error with linear FO-PID scheme. It is easy to implement, cost effective, enjoys self-tuning control feature and flexible. Further NL-PID, FO-PID as well as basic PID control schemes are also realized for comparative study. The associated parameters and gains of control structures are optimally tuned by NSGA-II for minimum variation in error and control signal. Intensive simulation studies are performed to critically examine the performance of the designed controllers for reference tracking, model uncertainty, disturbance and noise rejection quantitatively. Simulation studies validate both design technique and structure of nonlinear controller for accurate tracking of time varying trajectories. So, it is concluded that proposed NLF-PID offers simple, robust and efficient control of the two link robotic manipulator.
The proposed scheme is very effective in reference tracking, dealing with uncertainty, suppression of noise and disturbance. Therefore its real time implementation would be particularly appropriate for accurate positioning and tracking in industrial environment such as nuclear power plant, chemical industry, space sciences, textile and medical application, where variation in parameters, disturbance and noise can occur frequently.